Download
1 / 1
10 likes | 148 Views
IC autonomous platform. MW/RF wireless link. long range (100 m) MW remote recharging OOK downlink acknowledgment. low-power (<100 uW) plug-in sensor modules rechargable micro-battery. energy aware protocols. reliable bandwidth efficient low latency.

E N D
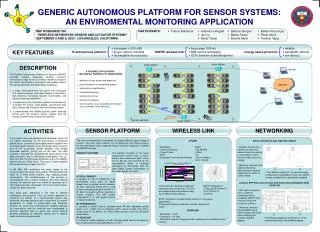
IC autonomous platform • MW/RF wireless link • long range (100 m) • MW remote recharging • OOK downlink acknowledgment • low-power (<100 uW) • plug-in sensor modules • rechargable micro-battery • energy aware protocols • reliable • bandwidth efficient • low latency GENERIC AUTONOMOUS PLATFORM FOR SENSOR SYSTEMS:AN ENVIROMENTAL MONITORING APPLICATION NSF WORKSHOP ON: “WIRELESS NETWORKED SENSOR AND ACTUATOR SYSTEMS” SEPTEMBER 8 AND 9, 2003 - LOS ANGELES, CALIFORNIA PARTICIPANTS: • Franco Maloberti • Andrea Fumagalli • Jin Liu • Murat Torlak • Stefano Gregori • Marco Tacca • Devrim Aksin • Balkan Kecicioglu • Paolo Monti • Tianhon Yang KEY FEATURES base station base station DESCRIPTION end user • A POSSIBLE APPLICATION: • CAR RENTAL PARKING LOT MONITORING • detection of cars arrival and departure • precise location of free parking spaces • automatic car identification • automated inventory • security monitoring • secure car checkout • on-line access to car availability information (e.g. car model, color, features) The Generic Autonomous Platform for Sensors (GAP4S) provides multiple integrated sensing functions, transmission range of tens of meters, remote re-charge of the sensor micro-battery, and end-to-end reliable access. The above objectives are obtained by combining: internet • a single micro-board with full-custom ultra low-power IC's (sensing devices and radio frequency transmitter), high efficiency microwave receiver, micro-battery, and signal processing capabilities, • a unique use of the microwave signal to simultaneously re-charge the sensor micro-battery, synchronize data slots, and provide the return link from the base station, • a power-aware and reliable protocol stack spanning across both the wireless sensor network and the existing network infrastructure (the Internet). end user uplink downlink sensor platform base station SENSOR PLATFORM WIRELESS LINK NETWORKING ACTIVITIES A full-custom chip was designed and fabricated using 0.18 µm CMOS technology on the micro-board. A combined optical sensor (a low-resolution digital camera together with an analog motion detector and a low power data converter) and an RF transmitter (power amplifier and voltage controlled oscillator (VCO)) are on the chip. The data converter, used both for recharging the pixels and for 7-bit data conversion, has 10 µW power consumption. The LC-tank VCO has 150 µW power dissipation and a 100 dBc/Hz phase noise (at 1 MHz offset). The class E power-amplifier has power efficiency higher than 80%. A 433 MHz FSK modulation has been chosen in the communication link sensor-base-station. FSK eliminates the need for a linear power-amplifier, thus reducing power consumption. The multiple-access of the sensors is accomplished with a hybrid frequency and time division scheme. An empirical path loss model for distances up to 100 meters has been developed. The smart antenna base-station has been designed. Two tasks were addressed in the field of network architecture and protocols. First, an original approach to maximize the lifetime of a cluster-based system was examined. A greedy algorithm able to determine the optimal assignment of nodes to cluster-heads was designed. Second, the end-to-end communication reliability between the base-station and the end-user was investigated. A dynamic algorithm able to reduce the overall network blocking probability by efficiently making use of network spare resources was presented. The autonomous platform is designed to integrate different types of plug-in sensors. The most critical sensors for the application are image sensors. An ultra-low power motion triggered imager has been designed to validate the GAP4S concept. UPLINK Ad hoc Network Design Algorithm (ANDA) • Modulation : BFSK • Center Frequency : 433.92 MHz • Output Power : 4 dBm • BER : 10-3 • Expected Communication Range : 100 m (outdoor) • 60 m (indoor) • Communication distance is reduced • indoor because of high loss. This can • be compensated using beamforming • and coding in base stations • BFSK modulation: An appropriate solution for low power applications • Freespace Pathloss model with pathloss exponent 3 indoor • Network lifetime: time period from when the network starts functioning to the instant in which the first node runs out of energy SENSOR PLATFORM The platform includes in the same micro-board: custom chips, a micro-battery and commercial parts. Since all the devices are powered by the micro-battery which is remotely recharged via microwave from the base station, power consumption is the major design constraint. • Objective: maximize the network lifetime by determining the optimal assignment of nodes to cluster-heads (b) (a) • Two different scenarios : a) network energy configuration computed only once, b) network energy configuration is periodically updated OPTICAL SENSOR It contains a 0.18 µm CMOS 64 × 64 photodiodes array used as digital imager and as analog motion detector. An ADC operating at 200 kHz is used for both recharging the pixel and for a 7-bit data conversion without requiring a charge amplifier. The ADC power consumption is 10 µW (figure-of-merit: 0.18 pJ/conversion). Dynamic SPP Protection scheme with Differentiated Reliability (DiR) - DSPP-DiR Beamforming gain is 10log10(M) dB, where M is the number of antennas • DiR: each connection has a maximum conditional failure probability (MCFP) that must be met by the protection scheme RF TRANSMITTER It contains a CMOS class E switched-mode PA with adjustable power levels (-2, 0, 4 dBm) and an efficiency >80%, and a LC-tank VCO with a phase noise of 100 dBc/Hz at 1 MHz offset frequency and 150 µW power consumption. RF RECEIVER It contains a rectifier based on a GaAs Schottky diode used to recharge the micro-battery with an average efficiency of 50%. • Objective: minimize the probability that a traffic request is blocked while satisfying the request reliability degree. DOWNLINK • Modulation : OOK • Frequency : 2.4 GHz • Microwave signals: Energy source to recharge micro-batteries in the sensors. (a) (b) • Blocking probability as a function of: a) the network load and b) the reliability degree