Multi-Agent Coordination for Multi-robot Task Allocation and Area Coverage
Multi-Agent Coordination for Multi-robot Task Allocation and Area Coverage. Raj Dasgupta C-MANTIC Group Computer Science Department University of Nebraska at Omaha. Presentation at INAOE August 13, 2012. Outline. Introduction and Preliminaries Multi-robot Coverage Robotic Team Formation


Multi-Agent Coordination for Multi-robot Task Allocation and Area Coverage
E N D
Presentation Transcript
Multi-Agent Coordination for Multi-robot Task Allocation and Area Coverage Raj Dasgupta C-MANTIC Group Computer Science Department University of Nebraska at Omaha Presentation at INAOE August 13, 2012
Outline • Introduction and Preliminaries • Multi-robot Coverage • Robotic Team Formation • Flocking • Coalition Game • Multi-robot Task Allocation • Swarm-based • Auction-based • Ongoing and Future Work INAOE 2012 - Raj Dasgupta
Research Problem (1) • How to coordinate a set of agents (each agent is situated on a robot) to perform a set of complex tasks in a collaborative manner • Complex task: single robot does not have resources to complete the task individually • Coordination can be synchronous or asynchronous • Robots might or might not have to perform the task at the same time • Distributed • Autonomous INAOE 2012 - Raj Dasgupta
Research Problem (2) • Performance metric(s) need to be optimized while performing tasks • Time to complete tasks, distance traveled, energy expended • Robots are able to communicate with each other • Bluetooth, Wi-fi • IR INAOE 2012 - Raj Dasgupta
Applications • Humanitarian de-mining (COMRADES) • Autonomous exploration for planetary surfaces (ModRED) • Automatic Target Recognition (ATR) for search and recon (COMSTAR) • Unmanned Search and Rescue • Civlian and domestic applications like agriculture, vaccum cleaning, etc. INAOE 2012 - Raj Dasgupta
Robot Platforms INAOE 2012 - Raj Dasgupta E-puck mini robot - suitable for table-top experiments for proof-of-concept CorowareCorobot (indoor robot)- suitable for experiments in indoor arena within lab; hardware and software compatible with Coroware Explorer robot Coroware Explorer (outdoor robot) –all terrain robot for outdoor experiments All techniques are first verified on Webots simulator using simulated models of e-puck and Corobot robots
Solutions • Swarming or emergent computing for low-level coordination • Fast, easy to implement • No guarantee of achieving desired outcome always • When swarming-based coordination fails... INAOE 2012 - Raj Dasgupta Low-level coordination Swarming Layer
Solutions Rules of Encounter Game Theoretic Layer • Swarming or emergent computing for low-level coordination • Fast, easy to implement • No guarantee of achieving desired outcome always • When swarming-based coordination fails...use a higher-level coordination mechanism • Game theory • Branch of micro-economics that gives rules of encounter between humans INAOE 2012 - Raj Dasgupta Low-level coordination Swarming Layer
Outline • Introduction and Preliminaries • Multi-robot Coverage • Robotic Team Formation • Flocking • Coalition Game INAOE 2012 - Raj Dasgupta
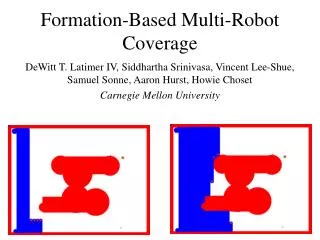
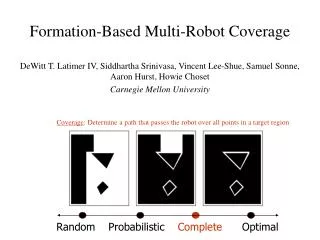
Distributed Multi-robot Coverage • Use a set of robots to perform completecoverage of an initially unknown environment in an efficient manner • Efficiency is measured in time and space • Time: reduce the time required to cover the environment • Space: avoid repeated coverage of regions that have already been covered • The region of the environment that passes under the swathe of the robot’s coverage tool is considered as covered INAOE 2012 - Raj Dasgupta Source: Manuel Mazo Jr. and Karl Henrik Johansson, “Robust area coverage using hybrid control,”, TELEC'04, Santiago de Cuba, Cuba, 2004 Tradeoff in achieving both simultaneously
Flocking-based Controller for Multi-robot Teams INAOE 2012 - Raj Dasgupta Works with physical characteristics such as wheel speed, sensor reading, pose, etc. Controller Layer (uses flocking)
Multi-robot teams for area coverage • Flocking based formation using Reynolds’ flocking model • Theoretical analysis: Forming teams gives a significant speed-up in terms of coverage efficiency • Simulation Results: The speed-up decreases from the theoretical case but still there is some speed-up as compared to not forming teams INAOE 2012 - Raj Dasgupta
Coverage with Multi-robot Teams Square Corridor INAOE 2012 - Raj Dasgupta 20 robots in different sized teams, in different environments over 2 hours Office P. Dasgupta, T. Whipple, and K. Cheng, "Effects of Multi-Robot Team Formation on Distributed Area Coverage," International Journal on Swarm Intelligence Research (IJSIR), vol. 2, no. 1, 2011, pp. 44-69.
Dynamic Reconfigurations of Multi-robot Teams • Having teams of robots is efficient for coverage • Having largeteams of robots doing frequent reformations is inefficient for coverage • Can we make the robot teams change their configurations dynamically • Split and merge teams based on their recent performance INAOE 2012 - Raj Dasgupta
Layered Controller for Dynamically Reforming Multi-robot Teams Works with agent utility, agent strategies, equilibrium points, etc. Coalition Game Layer (uses WVG) Rules of Encounter Game Theoretic Layer Map from agent strategy to robot action, sensor reading to agent utility, maintain data structure for mapping Mediator INAOE 2012 - Raj Dasgupta Controller Layer (uses flocking) Low-level coordination Swarming Layer Works with physical characteristics such as wheel speed, sensor reading, pose, etc.
Coalition game-based Team Reconfiguration • Coalition games provide a theory to divide a set of players into smaller subsets or teams • We used a form of coalition games called weighted voting games (WVG) • R: set of players (robots) • Each player i is assigned a weightwi • q: threshold value called quota • Solution concept: What is the minimum set of players whose weights taken together can reach q INAOE 2012 - Raj Dasgupta minimize |S| subject toS wi >=q for all S subset of R ie S
Coalition game-based Team Reconfiguration • Coalition games provide a theory to divide a set of players into smaller subsets or teams • We used a form of coalition games called weighted voting games (WVG) • R: set of players (robots) • Each player i is assigned a weightwi • q: threshold value called quota • Solution concept: What is the minimum set of players whose weights taken together can reach q Gives each robot’s coverage performance Minimum coverage quality reqd. by a team INAOE 2012 - Raj Dasgupta minimize |S| subject toS wi >=q for all S subset of R ie S
Coalition game-based Team Reconfiguration • Coalition games provide a theory to divide a set of players into smaller subsets or teams • We used a form of coalition games called weighted voting games (WVG) • R: set of players (robots) • Each player i is assigned a weightwi • q: threshold value called quota • Solution concept: What is the minimum set of players whose weights taken together can reach q Gives each robot’s coverage performance Minimum coverage quality reqd. by a team INAOE 2012 - Raj Dasgupta Minimum Winning Coalition (MWC) minimize |S| subject toS wi >=q for all S subset of R ie S
Outline of WVG Algorithm for Robot Team Formation • Each follower robot in a team reports its coverage ratio in last T time steps as its ‘weight’ in the WVG to leader robot • Represented as a ratio; low values correspond to bad (repeated area), higher values to good (new area) coverage quota=3.5 INAOE 2012 - Raj Dasgupta • Two heuristics proposed to calculate MWC • BMWC: Enumeratesall MWCs and finds the one with most robots that have closest pose and shortest distance to form a team with leader – O (R2) • Greedy: Stops as soon as it finds first MWC – O (R log R) P. Dasgupta and K. Cheng, “Distributed Multi-robot Team Reconfiguration using Weighted Voting Game,” DARS 2010 + forthcoming journal publication
Wvg Team Formation Demo INAOE 2012 - Raj Dasgupta
WVG Team Formation Results INAOE 2012 - Raj Dasgupta Time spent by 5-robot team in different reconfiguration operations Percentage of a 4 m2 environment covered by 5-robot team in 30 mins for different percentage of free space in env.
Conclusions and Lessons Learned • Proposed a new concept of using coalition game for dynamic team reconfiguration of robots • Stablity and convergence verified analytically and experimentally • Generates fewer coalitions (lesser running time) than existing multi-robot coalition generation algorithm by Vig et al [IEEE TRO 2006] • Current technique: • If the team is getting obstacles, retain q% (e.g., 70%) of the team • How to adapt this value of q? • Transfer learning: store patterns of obstacles encountered in the past and learn a mapping from obstacle pattern to best possible action of team (preliminary work in ARMS 2011) INAOE 2012 - Raj Dasgupta
Outline • Introduction and Preliminaries • Multi-robot Coverage • Robotic Team Formation • Flocking • Coalition Game • Multi-robot Task Allocation • Auction-based • Swarm-based heuristics INAOE 2012 - Raj Dasgupta
Multi-robot Task Allocation • Our solutions: • Swarming heuristics-based: Simple to implement, high comm. overhead. • Market (auction)-based: • Guarantees per task completion time, time-out when a task cannot be completed, trade-off (efficiency loss) in waiting for better solutions • Almost 90% lower comm. overhead than heuristics approaches • T tasks, R robots, T >> R • Constraints: • Each robot can communicate with a subset r of other robots (can change over time) • Robots do not know T, has to be discovered online by robots • Each task has to be done by rcap robots • Each task has time constraint • Problem: How to find an allocation from 2R -> T while minimizing the time (distance traveled) and communication overhead to all robots • NP-complete problem INAOE 2012 - Raj Dasgupta Legend Task Robot Direction of movement
Auction-based MRTA • An agent discovers a task and begins an auction • Other agents in communication range hear about the auction • If an agent does not have a full task list, it bids in the auction with its distance to the task, via any tasks on its task list INAOE 2012 - Raj Dasgupta R’s task list 4 4 R
Auction-based MRTA: FixedBids • An agent discovers a task and begins an auction • Other agents in communication range hear about the auction • If an agent does not have a full task list, it bids in the auction with its distance to the task, via any tasks on its task list – because it can’t decommit from a previously committed/won auction INAOE 2012 - Raj Dasgupta R’s task list 4 3 4 R 5 R’s bid on = 7 = 4+3
FixedBids Bidding Strategy Problem • Previous strategy: Bidwith distance from current location to the task’s location, via any tasks on its task list (No de-commitment!) • Constraint: Newly arriving tasks added at end of task list • Problem: Creates very inefficient routes INAOE 2012 - Raj Dasgupta 4 3 4 R’s task list 6 R 7 = 4+3 R’s bid on = 7+6=13
DynamicBids Auction • Soft bids:Bid with a lower bound and an upper bound value(instead of a single bid) • Agent can then replan its path while keeping its edges (to different tasks already on its task list) between bidl and bidu INAOE 2012 - Raj Dasgupta R’s task list 4 3 (4, 8) R (7, 12)
DynamicBids Auction • Soft bids:Bid with a lower bound and an upper bound value(instead of a single bid) • Agent can then replan its path while keeping its edges (to different tasks already on its task list) between bidl and bidu INAOE 2012 - Raj Dasgupta R’s task list 4 3 (4, 8) R (7, 12)
DynamicBids Auction • Soft bids:Bid with a lower bound and an upper bound value(instead of a single bid) • Agent can then replan its path while keeping its edges (to different tasks already on its task list) between bidl and bidu INAOE 2012 - Raj Dasgupta R’s task list R’s actual cost (2, 5) 2 3 3 (4, 8) 5 2 R (7, 12) 8
Bidder Algorithm with DynamicBids • On receiving information about a new task (request for bid) • Solve a TSP (approximation algorithm) with nodes corresponding to the existing tasks in task list and new task • If bidu is not exceeded for any task already committed to (existing in task list) as per TSP solution • Insert new task into task list at position given by TSP • Send the cumulative path cost of new task as bidl • Calculate bidu = bidl + ~N(rc/2,1.0) • Send (bidl, bidu) to auctioneer as soft bid for new task • Else don’t bid on new task INAOE 2012 - Raj Dasgupta
DynamicBidsAuctioneer side • Two criteria for selecting winners from the set of bidders • Who has the least cost (distance) to get here (bidl) • What could be the delay in executing the task (and consequent decay in pheromone) if the bidder revises its bid to bidu later on • Called “Loss in efficiency” • Given by (1-e(bidl-bidu)/v)/(nbid e bidl/v+1) • Selects bidder based on a weighted product of these two criteria INAOE 2012 - Raj Dasgupta
Analytical Results: Auctioneer • DynamicBidsalgorithm is robust • Handles livelocks gracefully • Analytically proven upper bounds on • How many bids an auctioneer should wait for • How much time it should wait for getting those bids • How much can auctioneer “lose” if a bidder revises its bids • Is DynamicBids always better? • Theorem: • Marginal cost for every task using the DynamicBids algorithm < Marginal cost of the task using the FixedBids algorithm. INAOE 2012 - Raj Dasgupta
Experimental Setup • Webots robotic simulation platform • 4 X 4 m2 environment • 9-27 e-pucks, 5-60 tasks placed randomly, averaged over 10 runs • E-puck sensors • IR • Bluetooth • Camera • Overhead camera based localization INAOE 2012 - Raj Dasgupta
DynamicBids Auction MRTA Results INAOE 2012 - Raj Dasgupta
DynamicBids Auction MRTA Results INAOE 2012 - Raj Dasgupta
Swarm-based Heuristics for MRTA • Distance-based heuristic • Select a task that is “closest to me and has highest amount of pheromone” • Robot density-based heuristic • Each robot selects a task that has least number of robots in its vicinity, lowest pheromone (starved tasks first) • Preference-based heuristic • Density-based heuristic + amount of task outstanding (starved tasks nearing completion first) • Proximity-based heuristic • Density-based heuristic + effect of other robots - how many other robots are likely to be headed (ahead of me) to the task? • Swarm-based heuristics • Require flooding of task updates to all robots in communication range • Robots make decisions asynchronously INAOE 2012 - Raj Dasgupta • D. Miller, P. Dasgupta, T. Judkins, "Distributed Task Selection in Multi-agent based Swarms using Heuristic Strategies,“ LNCS vol. 4433 (Proc. 2nd Swarm Robotics Workshop, Rome, Italy), 2006, pp. 158-172. • P. Dasgupta, "Multi-Robot Task Allocation for Performing Cooperative Foraging Tasks in an Initially Unknown Environment,“ Innovations in Defense Support Systems - 2 , Springer, Studies in Computational Intelligence, vol. 338, 2011, pp. 5-20.
Auction vs. Swarm-based Heuristics for MRTA INAOE 2012 - Raj Dasgupta
Auction vs. Swarm-based Heuristics for MRTA Comparison of total number of bytes between auction protocol and swarming-based heuristic protocols INAOE 2012 - Raj Dasgupta
Auction-based MRTA on Physical e-puck robots INAOE 2012 - Raj Dasgupta
Conclusions And Lessons Learned • Market-based MRTA offers an inherently distributed and robust technique for MRTA • Communication overhead is significantly lower than swarm-heuristic based techniques • Soft guarantees can be made about time (no. of rounds) required to complete tasks • Market-based MRTA algorithms are not the silver bullet • Open Problem: Is there a relationship between spatial and temporal distribution of tasks and type of MRTA algorithm used? • MRTA results (time) are very susceptible to underlying robot path planning algorithm INAOE 2012 - Raj Dasgupta
User Interface for Robot Control INAOE 2012 - Raj Dasgupta
Explorer Robots INAOE 2012 - Raj Dasgupta
Ongoing Work • Coverage • Dynamic coverage information compression (ICINCO 2011) • Using Voronoi Partitions for Coverage (ACODS 2012, SPIE 2012, ICRA 2012, ARMS 2012) • MRTA • Spatial Queueing Theory for MRTA (ICINCO 2012) • Reconfiguration Planning for modular robots (ModRED project) • Distributed Information Aggregation (Foretell project) INAOE 2012 - Raj Dasgupta
Conclusion • Multi-agent and multi-robot systems appear to be made for each other • Collaboration through coordination is cornerstone of both MAS and MRS • Bridging the gap • Abstractions, assumptions vs. crisp definitions • Robustness in operation, data (sensor error) • Computational overhead vs. fast operation • Simulations vs. physical experiments • Scientists vs. engineers INAOE 2012 - Raj Dasgupta
Acknowledgements • We thank our sponsors • DoD Navair • US Office of Naval Research • NASA (ESPCoR program) • C-MANTIC Research Group Members • Coverage: Taylor Whipple, Dr. Ke Cheng, • Task Allocation: Taylor Whipple, Matthew Hoeing, David Miller, Timothy Judkins • http://cmantic.unomaha.edu INAOE 2012 - Raj Dasgupta