Formation-Based Multi-Robot Coverage
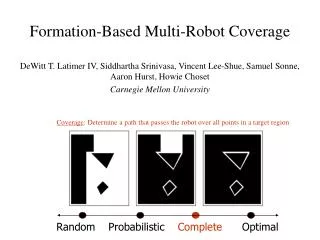
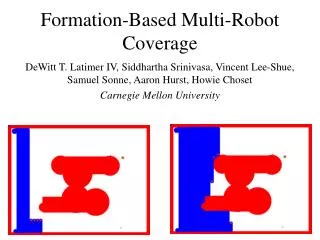
Formation-Based Multi-Robot Coverage DeWitt T. Latimer IV, Siddhartha Srinivasa, Vincent Lee-Shue, Samuel Sonne, Aaron Hurst, Howie Choset Carnegie Mellon University Coverage Determine a path that passes the robot (or effector) over all points in a target region (volume)

Formation-Based Multi-Robot Coverage
E N D
Presentation Transcript
Formation-Based Multi-Robot Coverage DeWitt T. Latimer IV, Siddhartha Srinivasa, Vincent Lee-Shue, Samuel Sonne, Aaron Hurst, Howie Choset Carnegie Mellon University
Coverage • Determine a path that passes the robot (or effector) over all points in a target region (volume) Random Probabilistic Complete Optimal
Problem Statement • Assumptions • Unknown space • Homogenous circular robot • No marking capability • Common coordinate frame • Task • Complete coverage of space • Coordinated among multiple robots • “Minimize” repeat coverage • Decentralized planning (yet coordinated)
Challenges • Guaranteeing completeness • Single robot: Hert & Lumelsky, Choset & Acar, Cao • Multi-robot: Butler, Hollis, and Rizzi • Minimize repeat coverage • Planning in a multi-dimensional configuration space • Balch and Arkin, each robot acts independently • Space not known a priori • Single robot: Hert & Lumelsky, Choset & Acar, Cao • Multi-robot: Butler, Hollis, and Rizzi • Scalability
Reeb graph represents the topology of • the cellular decomposition Cell-Decomposition Approach • Define Decomposition • Completeness • Sensor-based Construction • Incrementally construct • Extend to Multiple Robots
Slice (Canny and Canny & Lin) h(x,y) = x
Rangesensor At a critical point x, Critical Point Sensing slice At a critical point x of where M = {x|m(x)=0}
Encountering All Critical Points • Conventional back and forth motions are not sufficient • (Cao et al.’88, Hert et al.’97, Lumelsky et al.’90)
NOT Occupancy Grid: Less memory, More meaningful, Minimize turns, Completeness Complete Coverage
Sensor-based Complete Coverage Goal: Complete coverage of an unknown environment Cell decomposition Incremental construction Time-exposure photo of a coverage experiment
Cover Interior of Cell (one corridor at a time) Wall follow Lap
Critical Point Sensing Look for parallel vectors during forward wall following, but after a reverse wall follow, lap, and then the forward Look for anti-parallel vectors during reverse wall following Look for parallel vectors during forward wall following Look for parallel vectors during reverse wall following
Action at Critical Points Team divides into two separate teams, each covering a new cell VIRTUAL FRONTIER (Butler) Team finishes cell and then looks for a new cell to cover
Virtual Frontier As an attempt to minimize repeat coverage, we use the virtual frontier believing that another team will be coming from the “other” cell associated with the forward critical point
Team Rejoining (work in progress) • Types of encounters • Two teams covering in opposite slice directions • Both teams finish the current corridor • Two teams covering in same slice direction • Both teams finish the current corridor • One team covering and the other traversing • Since robots only traverse through known space, the covering team stops covering and joins traversing team • Two teams encountering each other on the border of two cells (very hard case) • Combine adjacency graphs
Acknowledgements • Dave Conner • Ercan Acar • Tucker Balch • Matt Mason and Mike Erdmann