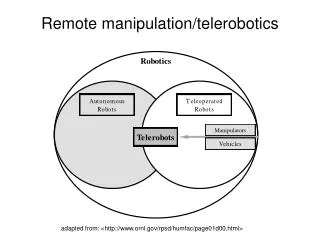
Remote manipulation/telerobotics
Remote manipulation/telerobotics. adapted from: <http://www.ornl.gov/rpsd/humfac/page01d00.html>. Sources:. Wickens et al. <http://www.ornl.gov/rpsd/humfac/page01d00.html> a good site from the Oak Ridge National Lab

Remote manipulation/telerobotics
E N D
Presentation Transcript
Remote manipulation/telerobotics adapted from: <http://www.ornl.gov/rpsd/humfac/page01d00.html>
Sources: • Wickens et al. • <http://www.ornl.gov/rpsd/humfac/page01d00.html> • a good site from the Oak Ridge National Lab • contains several essays on the human factors aspects of telerobotics and teleoperation • Milgram, P., Zhai, S., and Drascic, D. (1993) Applications of augmented reality for human-robot communication.Proceedings of IROS’93: International Conference on Intelligent Robots and Systems, Yokohama, Japan. <http://vered.rose.utoronto.ca/people/david_dir/IROS93/IROS93.full.html>
Definitions • telerobots • robots that are not autonomous, but are controlled to some degree by human operators • teleoperator • “… robotic devices that synergistically combine human and machine.” • operator replication metaphor • provide display and control systems through which the human operator observes and controls the robot in an attempt to replicate the operator’s motor and cognitive capabilities at the remote site. • telepresence - 3 definitions • simple - “the ability to operate in a remote world” • cybernetic- “an index of the quality of the human-machine interface” • experiential - “a mental state in which a user feels physically present within the remote world.”
Applications • Remote manipulation • undersea • planetary • Hazardous manipulation • hazardous materials • hazardous environments
Teleoperation tasks • The tasks involved in teleoperation include a mix of ... • programming • teaching • controlling • commanding • monitoring • Depending on the location and nature of the task, issues involve • level of control • time delays • situation awareness (including depth perception and image quality) • force proprioceptive feedback
Level of control adapted from: <http://www.ornl.gov/rpsd/humfac/page01d00.html>
Time delays • Transmission delays • information from remote site • control action and response • Sluggish response of system being controlled • Time to translate control actions into appropriate machine activities
Situation awareness (telepresence) • Depth perception • 3D stereoscopic displays • display enhancements • Image quality • improving camera / display technology • enhanced image • Field of view • wide angle lens / large display • scanning • Absolute vs relative judgements of distance, size, etc. • display aiding • control aiding • virtual reality technology
Force & proprioceptive feedback • Control force and speed of movement of telerobot • 1st and 2nd order control issues • Proprioceptive feedback - force “reflection” • magnitude of forces or torques acting on an object - kinesthetic • distribution of forces on the manipulator - tactile • Advantages: • when forces applied to the remote area are important (e.g., to prevent damage to telerobot or the objects being manipulated) • when visual display of task components require guidance or assembly in areas are obscured for some reason • Disadvantages: • Requires additional processing, increasing delays • Increases system friction and inertia, reducing responsiveness
HF Design of teleoperated systems • Understand the requirements, constraints, and environmental factors • Model the system, task, and environment • Determine the information and action requirements (including level of control) of the operator • Based on an understanding of the system, task, and environment • Determine appropriate displays, controls, and aiding • Based on an understanding of human cognitive, information processing, and response, as well as design guidelines and issues • Understand the tradeoffs involved.
Ecological Approaches • Appropriate for design of systems to support human operators in complex, dynamic environments. • Founded on ecological psychology • “Simon’s Ant” example • Contrast with cognitivist approaches • Requires understanding of the system and environment within which the operator is working.
Ecological Interface Design (EID) • Based on the SRK taxonomy • Focus is on environmental constraints and system function
An Example • DURESS (DUal REservoir Simulation System) • Process control example • Small feedwater stream • 6 valves, 2 pumps, 2 heaters (from: Vicente, K.J. and Rasmussen, J. (1990) The ecology of human machine systems II: Mediating direct perception in complex work domains. Ecological Psychology, 2(3), pp.207-249)