Sources of Data
521 likes | 1.11k Views
Sources of Data. Sources of data. Map as a representation of the reality Ground survey and positioning Remote sensing data collection Census and sampling. Map as a representation of reality. Spatial data - spatially referenced objects or phenomena Reality Model construction and selection

Sources of Data
E N D
Presentation Transcript
Sources of data • Map as a representation of the reality • Ground survey and positioning • Remote sensing data collection • Census and sampling Sources of Data
Map as a representation of reality • Spatial data - spatially referenced objects or phenomena • Reality • Model construction and selection • Selection and construction to a cartographic representation • Map • Results in the user’s mental map Sources of Data
mental map map medium output drawing code for dots, dashes & patches digital cartographic model select and constructcartographic representation lines points area geometryattributes geometryattributes geometryattributes digital landscape model z x y model constructiongeographical object selection reality The nature of spatial data The nature of spatial data: from reality (a), via model construction and selection to digital landscape model (b), followed by selection and construction to a cartographic representation towards a digital cartographic model (c), presented as a map (d), which results in the user's mental map (e). From Kraak and Ormelig, 1996. Sources of Data
Geographical objects The representation of geographical objects in a (digital) environment as (a) points, (b) lines, (c) areas and (d) volumes. From Kraak and Ormeling, 1996 Sources of Data
1-D and 2-D objects The dimensionality of geographical objects – 1-D (inset map) and 2-D. From Kraak and Ormeling, 1996 Sources of Data
3-D objects The dimensionality of geographical objects – 3-D. From Kraak and Ormeling, 1996 Sources of Data
before after 18 May 1980 4-D objects The dimensionality of geographical objects – 4-D/time. From Kraak and Ormeling, 1996 Sources of Data
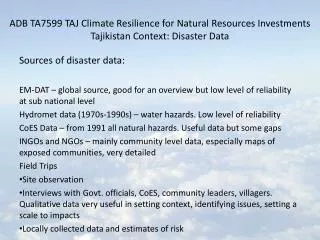
Ground survey and positioning • Geodesy - study of the shape and size of the earth. • The earth is so large that its curvature is relatively insignificant at the local scale. • Thus, we may use plane geometry instead of spherical geometry for plane survey. plane sphere Sources of Data
Surveying • The aim of surveying is basically to define the location of a point. • Since location is a relative rather than absolute concept, surveyors determine new positions with respect to an existing reference feature. • The geodetic control points provide the frame of reference for surveying. • Measurement of distance and angles based on the Euclidean geometry. Sources of Data
Measuring distance • Mechanical aids: measuring rods, flexible chains and ruled measuring tapes • Physical limitations • Electronic distance measuring (EDM) instruments: laser beam or radio waves • Line of sight Sources of Data
Laser distance measuring A laser distance measurer Laser beams and radio waves can be used to determine distances between electronic distance measuring instruments with great accuracy. From Robinson, et al., 1995 Sources of Data
Measuring direction • Direction is defined as angular deviation from a baseline • True north - direction to the north pole • Magnetic north pole: > 1600 km south of the true north pole and changing • Magnetic declination - local difference between the true and magnetic north • Compass deviation - unpredictable error in compass readings • Compass, optical sighting instruments, gyrocompass, radio compass Sources of Data
A theodolite By combining optics with a bubble level and vertical degree circle (a circular protractor ruled in degrees), surveyors could measure horizontal angles as well as vertical angles. The resulting instrument was called transit, which evolved into the modern theodolite. Robinson, et al., 1995 Sources of Data
Traditional survey methods • Finding horizontal position • Traverse • Triangulation • Trilateration • Finding vertical position • Differential leveling • Trigonometric leveling • Using a transit or theodolite Sources of Data
Y B(x2, y2) B A C C(x2, y1) A(x1, y1) X Y b C a A B c X Y b C a B A c X Some basic theorems Trigonometric Functions Pythagorean Theorem Distance Theorem Law of Cosines Law of Sines Sources of Data
Traverse (Measured angles and distance) The traverse method involves determining the location of an unknown point by making a series of direction and distance measurements. From Robinson, et al., 1995. Sources of Data
Triangulation (Measured angles) Starting with a baseline of known length on the ground, the position of an off-baseline point can be determined by triangulation, which involves measuring the angles to the point to be located from the ends of the baseline. From Robinson, et al., 1995. Sources of Data
Trilateration (Measured distance) Starting with a baseline of known length on the ground, the position of an off-baseline point can be determined by trilateration, which involves measuring distances to the point to be located from the ends of the baseline. From Robinson, et al., 1995. Sources of Data
Differential levelling Sources of Data
Trigonometric levelling Sources of Data
Automated survey systems • Total-station instruments • Electronic tacheometer • Electronic positioning • NAVSTAR (USDOD) global positioning system (GPS) • Fully operational in 1994 • 24 orbiting satellites (21+3) • Positioned in 6 evenly spaced orbital planes • Standard position service (SPS) and precise positioning service (PPS) Sources of Data
Total station A total station looks like a normal theodolite but it has a microcomputer for measuring and recording, as well as laser-beam device for distance measuring. Sources of Data
Global Positioning System A Global Positioning System (GPS) receiver that can be used in the field as a hand-held instrument or connected to the computer with digital maps as field navigation system. Sources of Data
Remote sensing data collection • Electromagnetic radiation (EMR) • Electromagnetic wave • Absorption and reflection • Aerial photography • Panchromatic film (0.3 - 0.7m) • Aerial photograph geometry • Electronic imaging devices • Satellite images Sources of Data
Sun’s energy (at 6000°K) Energy Earth’s energy (at 300°K) Infrared Visible UV 0.3m 1m 10m 100m 1mm 1m (a) Energy sources Wavelength 100% Energy absorbedand scattered Transmission 0% 0.3m 1m 10m 100m 1mm 1m (b) Atmospheric transmittance Wavelength Human eye Imaging radar Photography Thermal IR scanners Passive microwave Electro-optical sensors 0.3m 1m 10m 100m 1mm 1m Wavelength (c) Common remote sensing systems The electro-magnetic spectrum Sources of Data
B/W airphoto Sources of Data
Natural colour airphoto Sources of Data
Colour infrared airphoto Sources of Data
Panchromatic satellite image Sources of Data
Multi-spectral satellite image Sources of Data
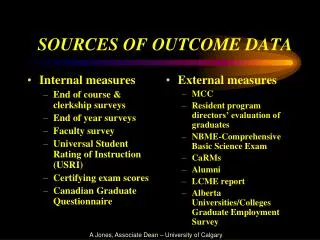
Census and sampling • Census - identify and record all members of a population. • Geocoding - the practice of attaching locational information to census data. • Entity focus - vector and raster geocoding. • Aggregation. Sources of Data
z P2(x2, y2) P5(x5, y5 , z5) P1(x1, y1) P4(x4, y4 , z4) POINT (X, Y) P5(x5, y5) P6(x6, y6, z6) P8(x8, y8, z8) P2(x2, y2) y P1(x1, y1, z1) P2(x2, y2, z2) P4(x4, y4) P3(x3, y3) P1(x1, y1) x P7(x7, y7, z7) P3(x3, y3, z3) Vector geocoding Coordinates are used to define the location of point, line, area and volume features in vector geocoding. From Robinson, et al., 1995 Sources of Data
COLUMNS 1 2 3 n Line 1 2 3 ROWS m (m, n) Point Area Raster geocoding Pixels are used to define the location of geographical entities in raster geocoding. After Robinson, et al., 1995 Sources of Data
Spatial sampling • To make observations at a limited number of carefully chosen locations that are representative of a distribution • Size of sample - dependent upon the nature of distribution • Sampling units - points, lines (transects) and areas (quadrats) Sources of Data
Sampling Units Area (Quadrat) sample Line (Transect) sample Point sample Spatial sampling is performed using either point, line or area units, or some combination of these geometric forms. Sources of Data
Sampling Strategy • Spatial distribution • Clustered, random and uniform distribution • Sampling strategy • Random • Systematic • Stratified • Sampling theorem - a sampling interval should be less than half the size of target features in a distribution Sources of Data
Sample scatter Clustering Random Regularity Sample scatter is usually described in terms of deviation from randomness, with clustering at one extreme and uniformity at the other. From Robinson, et al., 1995 Sources of Data
Forest Type Survey Vegetation diversity Low Sample site Medium High Stratification Sampling based on stratification is highly efficient, because it takes advantage of what is already known about the distribution being sampled. From Robinson, et al., 1995 Sources of Data
Period Amplitude Sampling Interval Sampling interval According to the sampling theorem, the sampling interval needs to be less than half the size of target features in a distribution. Robinson, et al., 1995 Sources of Data