Download
1 / 52
550 likes | 1.06k Views
Problem Solving and Search. Introduction to Artificial Intelligence CS440/ECE448 Lecture 2. This Lecture. Problem representation Problem solving through search Reading Chapter 2 Announcements My office hours: Weds. From 2 to 3pm. 2. 8. 3. 1. 2. 3. 1. 6. 4. 8. 4. 7. 5. 7.

E N D
Problem Solving and Search Introduction to Artificial Intelligence CS440/ECE448 Lecture 2
This Lecture • Problem representation • Problem solving through search Reading • Chapter 2 Announcements • My office hours: Weds. From 2 to 3pm.
2 8 3 1 2 3 1 6 4 8 4 7 5 7 6 5 Goal How do we goal from start configuration to the goal configuration? The 8-puzzle Start
2 8 3 1 6 4 7 5 2 8 3 2 8 3 2 8 3 1 4 1 6 4 1 6 4 7 5 7 5 6 7 5 2 8 3 2 8 3 2 3 2 8 3 6 4 1 4 1 4 1 4 8 6 1 7 5 7 5 7 5 7 5 6 6 The corresponding search tree
8-puzzle Vacuum World Cryptarithmetic 8-queens The water jug problem Missionaries and Cannibals Towers of Hanoi Traveling salesman Robot navigation Process or assembly planning VLSI Layout Toy Problems and Real Problems
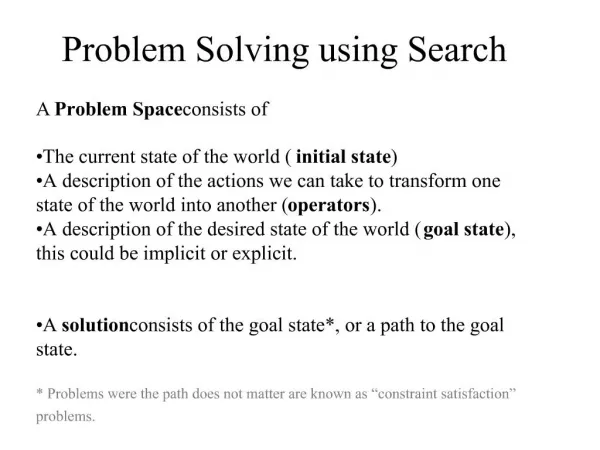
Problem Solving: • World State – values of all attributes of interest in the world. • State Space – the set of all possible world states. • Operators – change one state into another; cost of applying operator. • Goal – An (often partial) world state or states; in an agent, often implemented as a function of state and current percept. • Initial State – The values of attributes that are in effect at the beginning of a problem before any operators have been applied. • Note: The states and the operators define a directed (possibly weighted) graph. Solution (path) – a sequence of operators leading from the initial state to a goal state. Path cost – e.g. sum of distances, number of operators executed…
In the real world • The real world is absurdly complex. • Real state space must be abstracted for problem solving. • An abstract state is equivalent to a set of real states. • Abstract operator is equivalent to a complex combination of real actions. • Robot operator: Move down hall – In practice, this might involve a complex set of sensor and motor activities. • An abstract solution is equivalent to a set of real paths that are solutions in the real world.
2 8 3 1 2 3 1 6 4 8 4 7 5 7 6 5 Start Goal Example: The 8-puzzle • States: • Operators: • Goal Test: • Path Cost: • Constraints: 3£ 3 array of integer values Move tile number i left, right, up, down = goal state (given) 1 per move Can only move in a direction if that space is empty
2 8 3 1 2 3 1 6 4 8 4 7 5 7 6 5 Start Goal Example: The 8-puzzle • States: • Operators: • Goal Test: • Path Cost: • Constraints: Integer location of tiles (ignore intermediate positions) Move blank left, right, up, down = goal state (given) 1 per move Can only move blank in a direction if it stays in puzzle
2 8 3 1 2 3 1 6 4 8 4 7 5 7 6 5 Start Goal Example: The 8-puzzle 1 2 3 4 5 6 7 8 9 Initial State = [4, 1, 3, 6, 9, 5, 7, 2] Goal State = [1, 2, 3, 6, 9, 8, 7, 4]
Missionaries and cannibals • Three missionaries and three cannibals are on the left bank of a river. • There is one canoe which can hold one or two people. • Find a way to get everyone to the right bank, without ever leaving a group of missionaries in one place outnumbered by cannibals in that place.
Missionaries and cannibals • States: three numbers (i,j,k) representing the number of missionaries, cannibals, and canoes on the left bank of the river. • Initial state: (3, 3, 1) • Operators: take one missionary, one cannibal, two missionaries, two cannibals, one missionary and one cannibal across the river in a given direction (I.e. ten operators). • Goal Test: reached state (0, 0, 0) • Path Cost: Number of crossings.
Missionaries and Cannibals (3,3,1)
Missionaries and Cannibals A missionary and cannibal cross
Missionaries and Cannibals (2,2,0)
Missionaries and Cannibals One missionary returns
Missionaries and Cannibals (3,2,1)
Missionaries and Cannibals Two cannibals cross
Missionaries and Cannibals (3,0,0)
Missionaries and Cannibals A cannibal returns
Missionaries and Cannibals (3,1,1)
Missionaries and Cannibals Two missionaries cross
Missionaries and Cannibals (1,1,0)
Missionaries and Cannibals A missionary and cannibal return
Missionaries and Cannibals (2,2,1)
Missionaries and Cannibals Two Missionaries cross
Missionaries and Cannibals (0,2,0)
Missionaries and Cannibals A cannibal returns
Missionaries and Cannibals (0,3,1)
Missionaries and Cannibals Two cannibals cross
Missionaries and Cannibals (0,1,0)
Missionaries and Cannibals A cannibal returns
Missionaries and Cannibals (0,2,1)
Missionaries and Cannibals The last two cannibals cross
Missionaries and Cannibals (0,0,0)
Water Jugs • You are given: • a spigot, • a 3 Gallon jug, • a 4 Gallon jug. • The goal: Get 2 gallons of water in the 4 gallon jug. • Actions: Filling jugs from spigot, dumping water in jugs onto ground, dumping 4 gallon into 3 gallon jug until 3 gallon jug is full. Dumping 3 gallon jug into 4 gallon jug until empty or until 4 gallon is full, etc, etc.
States: How full are the two jugs? State Representation: 4G = ? 3G = ? Constraints: 0 4G 4 0 3G 3 Initial State: 4G = 0 3G=0 Goal State: 4G=2 Water Jugs
Operators • F3: Fill the 3 Gallon jug from the tap. • F4: Fill the 4 Gallon jug from the tap. • E4: Empty the 4-Gallon jug on the ground. • P43: Pour water from 4G jug into the 3G jug until 3G jug is full. • P34: Pour water from 3G jug into the 4G jug until 4G jug is full or 3G is empty.
Partial State GraphAnd Solution Path F3: Fill the 3 Gallon jug from the tap. F4: Fill the 4 Gallon jug from the tap. E4: Empty the 4-Gallon jug on the ground. P43: Pour water from 4G jug into the 3G jug until 3G jug is full. P34: Pour water from 3G jug into the 4G jug until 4G jug is full or 3G is empty.
A Toy Example: A Romanian Holiday • State space: Cities in Romania • Initial state: Town of Arad • Goal: Airport in Bucharest • Operators: Drive between cities • Solution: Sequence of cities • Path cost: number of cities, distance, time, fuel
Search Algorithms • Basic Idea: Off-line exploration of state space by generating successors of already-explored states (also known as expanding states). Function GENERAL-SEARCH (problem, strategy) returns a solution or failure Initialize the search tree using the initial state of problem loop do if there are no candidates for expansion, then return failure Choose a leaf node for expansion according to strategy if node contains goal state then return solution else expand node and add resulting nodes to search tree. end
Zerind Sibiu Timisoara Rimnicu Vilcea Arad Oradea Fagaras Sibiu Bucharest General Search Example Arad
Tree search example Expanded node Fringe
Implementation of Search Algorithms Nodes: state, parent-node,operator, depth, path cost Function GENERAL-SEARCH (problem, queing-fn) returns a solution or failure queue MAKE-QUEUE (MAKE-NODE(INITIAL-STATE[problem])) loop do ifqueueis empty, then return failure node Remove-Front(queue) if GOAL-TEST [problem] applied to STATE(node) succeeds then return node else queueQUEING-FN(queue,EXPAND(node,operators[problem])) end
States vs. nodes • A state is a (representation of a) physical configuration. • A node is a data structure constituting part of a search tree includes parent, children, depth, path costg(n). • States do not have parents, children, depth, or path cost!