Download
1 / 20
200 likes | 551 Views
What is Nanorobotics?. Programmable assembly of nm-scale components either by manipulation with macro or micro devices, or by directed self-assembly.Design and fabrication of robots with overall dimensions at or below the mm range and made of nm-scale components.Programming and coordination of large numbers (swarms) of such nanorobots..

E N D
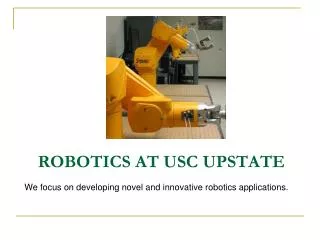
1. Nanorobotics at USC
3. Why Nanorobotics? Applications, especially biology, medicine and the environment.
Robotic science:
Different phenomena at the nanoscale: surface forces, quantum effects, �
Environments with large spatial uncertainties.
Dynamic environments, robustness, adaptability, �
New trade-offs between computation, motion, communication, �
New strategies, algorithms, software, hardware�
Minimalist robotics.
Swarm robotics.
4. Interactive Pushing
5. Making a Pattern
6. LMR in 3-D
7. Example of Automatic Manipulation
8. Automated Manipulation Demo
9. Nanorobot Issues Sensors
Computers and Control
Actuators and Propulsion
Power
Communications
Interfaces and Integration
nano/micro/macro
organic/inorganic
biotic/abiotic
Programming and Coordination
Nanorobots raise all the issues that are important for NEMS
10. Cell Identification by Force Sensing
11. Control Experiments
12. Nanowires
13. Microorganism Detection
14. Nanowire Detection of Algae in a Microchannel
15. Selective Functionalization of NW Mats
16. SEM Images of PPy Nanowires/Nanotubes 50 nm diameter PPy nanowire 100 nm diameter PPy nanotubule
17. Do These PPy Nanofibers Change Volume? AFM tip is placed directly over one of the PPy nanofibers to measure real-time height changes in response to cycling of voltage. 100 nm diameter fibers. Explain the experimental setup, emphasize that the tip is placed directly over the surface to allow for real-time monitoring of height change in response to voltage cyclingExplain the experimental setup, emphasize that the tip is placed directly over the surface to allow for real-time monitoring of height change in response to voltage cycling
18. Real-Time Actuation of 100nm PPy Nanofiber Explain graph, lower one first.
Point out the drastic behavior difference as compared to the film actuation response that was just presented.
Point out that actuation seems strange but peak sets correlate to voltage, and that the system is in transition.
Possible explanation is the sensitivity of the nanofiber system to the diffusion process of the mobile ions involved, where as for bulk property collective response predominates what is observed.Explain graph, lower one first.
Point out the drastic behavior difference as compared to the film actuation response that was just presented.
Point out that actuation seems strange but peak sets correlate to voltage, and that the system is in transition.
Possible explanation is the sensitivity of the nanofiber system to the diffusion process of the mobile ions involved, where as for bulk property collective response predominates what is observed.
19. Assembly Agent Model Perform a random walk (environment)
Grab and release neighbors
Exchange messages with neighbors
Store, look-up and execute simple rules
Increment and decrement a hop counter
20. Self-Repair and �Reproduction�