Download
1 / 22
220 likes | 541 Views
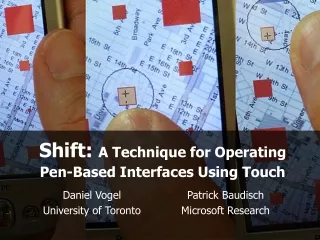
Haptic Pen: A Tactile Feedback Stylus for Touch Screens. Johnny C. Lee 1,2 Paul H. Dietz 2 Darren Leigh 2 William S. Yerazunis 2 Scott E. Hudson 1. 1 Carnegie Mellon University 2 Mitsubishi Electric Research Labs Santa Fe, NM UIST 2004. Last Year…. [Poupyrev and Maruyama, UIST 2003].

E N D
Haptic Pen: A Tactile Feedback Stylus for Touch Screens Johnny C. Lee1,2 Paul H. Dietz2 Darren Leigh2 William S. Yerazunis2 Scott E. Hudson1 1Carnegie Mellon University 2Mitsubishi Electric Research Labs Santa Fe, NM UIST 2004
Last Year… [Poupyrev and Maruyama, UIST 2003]
Our Goals: • Support large touch-sensitive displays. • Support multiple simultaneous users.
Our Goals: • Support large touch-sensitive displays. • Support multiple simultaneous users. Our Solution: • Haptic Pen - Feedback not tied to display - Individualized feedback - Pressure Sensitivity - Non-Contact Location data - Low-cost
Prototype Implementation External control board and power supply. RS-232 interface to PC. Components in prototype cost ~$10. Diamond Touch Interface [Dietz, UIST’01] - DT is a Multi-user front-projected touch table - Haptic Pen is location technology agnostic
Tactile Styli Anoto Pen (by Logitech) eccentric mass motor SensAble PHANTOM grounded reflective-force
Tactile Styli Anoto Pen (by Logitech) eccentric mass motor SensAble PHANTOM grounded reflective-force
Tactile Styli • Buzzing is sufficient for interaction feedback. • Impulse/High-Frequency forces necessary to simulate clicks are not possible. • Lateral forces are unnatural. Anoto Pen (by Logitech) eccentric mass motor
Force Vectors Longitudinal Lateral
Longitudinal Force along same force vector
Lateral Force lateral force is unnatural
Haptic Behaviors Haptic Behavior – a mapping of solenoid actions to the states and transitions of an interaction. Basic Click:
Haptic Behaviors for Buttons No Click – No feedback, primarily for control comparison Light Click – Light threshold, weak feedback(“ballpoint pen”) Basic Click – Medium threshold, medium feedback Hard Click – High threshold, strong feedback(“punch tool”) Buzz – Fixed strength buzz when pressed(“error”) Force Buzz – Proportional strength buzz(“dentist”) Two-Click – Two level button(“camera shutter”) Buzz-Click – Two level button(“test and confirm”)
Interaction Concepts • Multi-function buttons • Input error feedback • Two-Click for mapping stylus single & double click • Stiff confirmation buttons • Toggle switches – Light Click on, Hard Click off • Data Peeking – stiffness driven by hidden variable • Tactile Alerts – Continuous contact with user • Targeting – buzzing driven by proximity, region, or direction. • More in the paper…
Off the Screen Haptic Pen + Anoto Tracking = Drawable Tactile Interfaces 3D tracking allows tactile feedback on any registered surface.
Future Directions • Develop more robust and compact prototypes and explore a wireless implementation • Explore tasks which have the greatest potential for improvement in performance and user satisfaction • Develop hardware and software technologies for multi-user tactile applications
Thanks for coming to UIST 2004! Johnny Chung Lee johnny@cs.cmu.edu Carnegie Mellon University Mitsubishi Electric Research Labs
Techno-mumbo-jumbo • PIC16F876 with 10-bit A/D and 10-bit PWM • 5mm force sensitive resistor (CUI SF-5) • 16.1mm push-type solenoid (Guardian Electric) • Actuated mass: 26.7g • Supply Voltage: 20V • Min. Hold Continuous Current: < 1mA • Impulse Capacitor: 100F @ 20V • Min. Response Time: 5ms • Max. Energy: ~50mJ