Download

1 / 22
280 likes | 543 Views
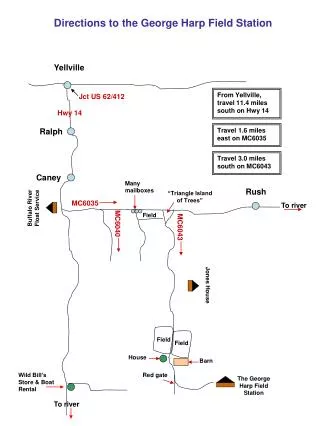
Field Station Sensors. 1.Wind Speed and Wind Direction 2.Ambient Air Temperature and Relative Humidity 3.Runway / Ground Temperature 4 .Precipitation 5.Barometric Pressure 6.Data Logger 7.Backup Wind Sensors 8.Transmissometer Sensor 9.Ceilometer Sensor. 8. 1. 7. 2. 4. 3. 5. 6.

E N D
Field Station Sensors 1.Wind Speed and Wind Direction 2.Ambient Air Temperature and Relative Humidity 3.Runway / Ground Temperature 4.Precipitation 5.Barometric Pressure 6.Data Logger 7.Backup Wind Sensors 8.Transmissometer Sensor 9.Ceilometer Sensor 8 1 7 2 4 3 5 6 9
Pressure Sensor Atmospheric pressure (PTB330) ประกอบด้วยทรานสดิวเซอร์จำนวน 3 ชุด โดยทำงานอิสระต่อกัน แต่ในกรณีที่ตรวจพบว่า ค่าตัวใดตัวหนึ่งมีค่าเปลี่ยนแปลงไปจากค่าที่ตั้งไว้ จะแจ้งเตือนไปยังผู้ใช้ผ่านทาง AVIMET ซอฟต์แวร์ ปกติจะติดตั้งอยู่ภายในตู้ Data Logger - ย่านการวัด 500…1100 hPa. Sending Mode - ทำการส่งข้อมูลโดยอัตโนมัติ (Autosend mode) และมีช่วงเวลาในการส่งทุก 60 วินาที
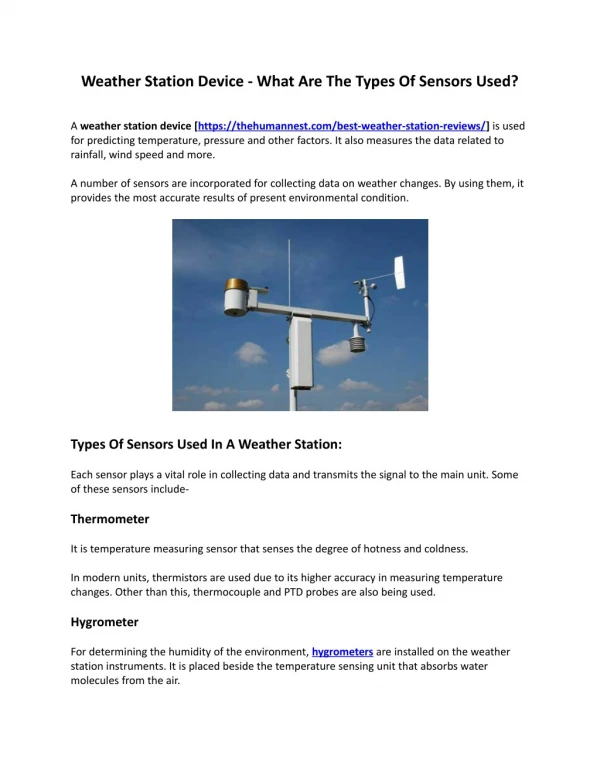
Air Temperature and Relative Humidity Air temperature วัดโดยใช้platinum type (PT100) sensor. - ความแม่นยำ (+/- 0.283 °C at +40 °C) Relative humidity วัดโดยใช้thin film type sensor. - ย่านการวัด 0.…100 %. - ความแม่นยำ (+/-) 1% below 90% RH และ (+/-) 1.7% ระหว่าง 90…100 RH. หมายเหตุ : ติดตั้งอยู่ที่ความสูงจากพื้นประมาณ 1.80 m. Sending Mode - ทำการส่งข้อมูลโดยอัตโนมัติ (Autosend mode) และมีช่วงเวลาในการส่งทุก 60 วินาที
Runway / Ground Temperature Sensor โครงสร้างของตัวภายนอกของตัวเซ็นเซอร์ทำจากสแตนเลส ติดอยู่บริเวณส่วนปลายของตัวเซ็นเซอร์ เซ็นเซอร์ที่ใช้เป็นชนิด platinum resistance (Pt-100) - ย่านการวัด -80 C…+80C. - ความไวในการวัด 0.385 Ohm/C. Sending Mode - ทำการส่งข้อมูลโดยอัตโนมัติ (Autosend mode) และมีช่วงเวลาในการส่งทุก 60 วินาที
Wind Speed / Direction Sensor Wind direction เมื่อใบพัดหมุนแต่ละครั้ง จะทำให้จานไปตัดลำแสง Infrared LED ที่ยิงผ่านจานไปยังตัวรับคือ phototransistors ซึ่งทำหน้าที่ถอดเป็นรหัส 6-bit GRAY-coded disc เพื่อแปลเป็นค่ามุมตามที่กำหนดไว้ ย่านการวัดที่ความเร็วลม 0.4 …75m/s สามารถวัดระหว่างมุม 0….360 C. Wind speed วัดโดยใช้ optoelectronic anemometer โดยanemometer ที่ใช้งานเป็นชนิดตอบสนองเร็ว ลูกถ้วยที่ใช้ทั้งสามชิ้นมีน้ำหนักเบาและมีความแม่นยำสูง สามารถวัดความเร็วได้ถึง 75 m/s. Sending Mode ทำการส่งข้อมูลโดยอัตโนมัติ (Autosend mode) และมีช่วงเวลาในการส่งทุก 3วินาที
Precipitation / Rain Gauge Sensor Rain Gauge - อุปกรณ์ตรวจวัดปริมาณนำฝนใช้ถ้วยในการรับน้ำฝน เมื่อปริมาณน้ำในถ้วยได้ปริมาณ 0.2 mm. ก็ทำให้ถ้วยเทน้ำทิ้ง ซึ่งเป็นการสร้างสัญญาณไปให้หน้าสัมผัสของreed-type relay ต่อกัน เพื่อส่งข้อมูลไปเก็บไว้ใน Data Logger Sending Mode - ทำการส่งข้อมูลโดยอัตโนมัติ (Autosend mode) และมีช่วงเวลาในการส่งทุก 60 วินาที
Data Logger MAWS301 Field Stations (QML201) ติดตั้งอยู่ที่จุด Touchdown (TZD) zones ของรันเวย์ โดยทำหน้าที่รับข้อมูลที่วัดได้จาก wind, pressure Temperature/humidity และ precipitation sensors ก่อนส่งไปยัง CDU ผ่านทาง สายสัณญาณ ในกรณีที่เสีย หรือไม่ทำงานจะทำให้ไม่สามารถรับข้อมูลใดจาก sensors ที่กล่าวมาข้างต้น Sending Mode - ทำการส่งข้อมูลโดยอัตโนมัติ (Autosend mode) และมีช่วงเวลาในการส่งทุก 60 วินาที
ค่า RVR คืออะไร Runway Visual Range (RVR) คือ ระยะที่นักบินซึ่งอยู่บนกลางรันเวย์สามารถมองเห็น จุดมาร์คบนรันเวย์ หรือ ไฟแนวขอบของรันเวย์ หรือ ไฟกึ่งกลางรันเวย์ ซึ่งค่า RVR ไม่สามารถสังเกตหรือวัดได้ แต่จะคำนวณได้จากค่าต่อไปนี้ 1.ค่าทัศนวิสัย (Visibility) 2.ค่าปริมาณความสว่างของรันเวย์(Background Luminance) 3.ค่า Runway Light Setting Interface หมายเหตุ : หากไม่มีค่าใดค่าหนึ่งจะไม่สามารถคำนวณหาค่า RVR ได้
การวัดหาค่า RVR วัดค่า ทัศนวิสัย Visibility Sensor RVR algorithm Background luminance Sensor RVR Value วัดปริมาณแสง Runway Light Setting Interface ตั้งไว้ที่ 100 %
PWD Forward Scatter Sensor : PWD22 ค่าทัศนวิสัย (Visibility) สามารถวัดหาค่าได้จากการวัดของ PWD Forward Scatter Sensor แล้วนำค่าที่วัดได้นี้ไปคำนวณหาค่า RVR • PWD22 measures light scattered at an angle of 45°. This angle • produces a stable response in various types of natural fog. • Precipitation droplets scatter light in a different manner as fog and • their contribution to visibility must be analyzed separately. PWD22 • can detect and measure precipitation droplets from the optical signal • and use this information in processing the scatter measurement results. • PWD22 has a small sample volume of about 0.1 liters (see Figure 3 • above). This allows for independent particles to be measured even at • relatively heavy precipitation intensities. The signal levels from even • the smallest precipitation droplets can also be detected.
Background Luminance Sensor : LM21 ค่าปริมาณความส่องสว่างของรันเวย์ สามารถวัดหาค่าได้จาก Background Luminance Sensor มีหน่วยเป็น cd/sq.mแล้วนำค่าที่วัดได้นี้ไปคำนวณหาค่า RVR ในกรณีที่เซ็นเซอร์เสีย ผู้ใช้สามารถแก้ปัญหาปัญหาในเบื้องต้นได้โดยใช้ ACTUAL Application ซึ่งอยู่ใน AVIMET Software
อุปกรณ์ที่ต่อร่วมกัน 1.Transmitter Unit (LTT211) 2.Receiver Unit (LTR211) 3.Background Luminance Sensor (LM21) 4.PWD Forward scatter Sensor
ข้อเด่น : มีระบบป้องกันสิ่งสกปรกที่จะเกิดขึ้นกับ Window
Form Power House 220VAC IN PUT Main Power (Filed Station) Breaker 45A Fuse 25A Fuse 25A Main Breaker Surge Power OUT PUT Stabilizer Plug To Sensors