Download
1 / 13
150 likes | 330 Views
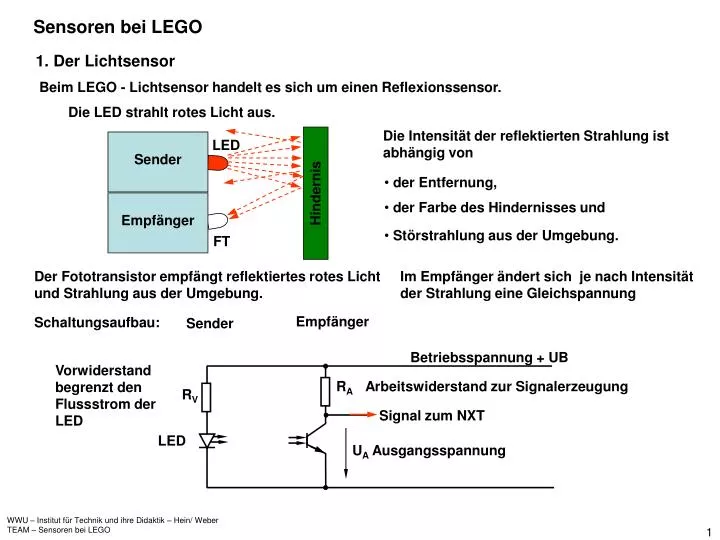
Sender. LED. Empfänger. FT. Signal zum NXT. R A. R V. LED. U A Ausgangsspannung. Sensoren bei LEGO. 1. Der Lichtsensor. Beim LEGO - Lichtsensor handelt es sich um einen Reflexionssensor. Die LED strahlt rotes Licht aus. . Die Intensität der reflektierten Strahlung ist abhängig von.

E N D
Sender LED Empfänger FT Signal zum NXT RA RV LED UA Ausgangsspannung Sensoren bei LEGO 1. Der Lichtsensor Beim LEGO - Lichtsensor handelt es sich um einen Reflexionssensor. Die LED strahlt rotes Licht aus. Die Intensität der reflektierten Strahlung ist abhängig von • der Entfernung, Hindernis • der Farbe des Hindernisses und • Störstrahlung aus der Umgebung. Der Fototransistor empfängt reflektiertes rotes Licht und Strahlung aus der Umgebung. Im Empfänger ändert sich je nach Intensität der Strahlung eine Gleichspannung Empfänger Schaltungsaufbau: Sender Betriebsspannung + UB Vorwiderstand begrenzt den Flussstrom der LED Arbeitswiderstand zur Signalerzeugung WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
RA RA Signal zum NXT UA Ausgangsspannung 3. Der Schallsensor Der Schallsensor wandelt akustische Signale in elektrische Signale um. Schaltungsaufbau: Betriebsspannung + UB Verstärker Arbeitswiderstand zur Signal-erzeugung Mikrofon als veränderlicher Widerstand Der NXT empfängt eine der Schallschwingung entsprechende Spannung. WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Ein Ultraschallsender strahlt akustische Impulse aus. Die Auswerteelektronik (AE) steuert den Prozess und berechnet aus der Laufzeit der Impulse den Abstand zum Hindernis. S Ein Hindernis reflektiert einen Teil der Impulse. AE E Ein Empfänger nimmt die Reflektierten Wellen auf. 3. Ultraschall- Abstandsmessung Ultraschall- Abstandsmessung ist auch als Echolot oder Sonar bekannt. Prinzip: Die Ausbreitungsgeschwindigkeit von Schallwellen ist von der Temperatur des Ausbreitungsmediums abhängig. Luft: = 0°C v = 331,5 ms-1 = 15°C v = 340 ms-1 Glas: v > 5500 ms-1 Wasser: v 1460 ms-1 Echolot für Wassertiefen bis 500 m benötigt eine Impulsleistung von 500 W bis 2,4 kW. Der zu entwickelnde Ultraschallsensor hat eine Impulsfrequenz von 66 Hz. Die Frequenz der Impulsschwingungen beträgt 40 kHz. Die Kompensation von Dopplereffekten bei hohen Geschwindigkeiten werden vernachlässigt. WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Takt-generator Zähler Binärteiler Q14 Q8 Q7 Q6 Q5 Reset Oszillator 500 kHz CLK Q4 Q3 Q2 Q1 & & Reset Speicher Oszillator 40 kHz US-Lautsprecher Decoder D4 D3 D2 D1 Q4 Q3 Q2 Q1 Impuls-verstärker Q9Q8Q7Q6Q5Q4 Q3 Q2 Q1Q0 A4 A3 A2 A1 CLK S T Q R Q US-Mikrofon MP1 Impuls-verstärker Entwicklung des Blockschaltbildes IC1 Nicht Bestandteil des LEGO-Sensors US - Oszillator Die Stromversorgung der einzelnen Baugruppen wurde nicht mit dargestellt. Zum Schaltplan: Kompa-rator RS-FF WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Speicher D4 D3 D2 D1 Q4 Q3 Q2 Q1 CLK Diesen Impuls liefert Q des FFs dann, wenn der Laufzeitimpuls das FF zurücksetzt. Decoder Q9Q8Q7Q6Q5Q4 Q3 Q2 Q1Q0 A4 A3 A2 A1 Zwischenspeicherung des Zählerstandes Der Zählerstand wird periodisch in den Speicher eingeschrieben. Die Übernahme der Daten erfolgt durch einen Impuls am CLK-Eingang. D.h., dass nach jeder einzelnen Messung der Zählerstand neu in den Speicher eingeschrieben wird. zurück Decodieren des BCD - Codes Im Decoder erfolgt die BCD – Dezimal – Decodierung. Die 10 Ausgänge werden mit LEDs beschaltet. zurück WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Zähler CLK Q4 Q2 Q2 Q1 CI & Reset Dimensionierung des Zählers Mit dem Zähler wird die Laufzeit tL ausgewertet. Die Entfernung des Gegenstandes wird in 10 Stufen angezeigt, d.h. sie wird mit 10 LEDs abgebildet. Damit ist ein binärer 4-Bit-Zähler ausreichend. Mit dem Startimpuls wird der Zähler zurückgesetzt. Vom Oszillator gelangen vom Ausgang Q5 die Zählimpulse in den CLK-Eingang des Zählers. Q5 des Oszillators liefert Zählimpulse mit der Frequenz 15,635 kHz und einer Periodendauer von 0,064 ms. Der Zählerstand hat bei 9 seinen Endstand erreicht. Das entspricht der maximalen Reichweite s. Dieser Wert gilt für den Hin- und Rücklauf des Signals. Die maximale Entfernung des Gegenstandes liegt dann bei ca. 10,575 cm. Der Fehler der Messung liegt bei etwa 5%. Die Schrittweite der Messung beträgt dann ca. 1 cm. Legt man Q6 des Oszillators auf den Eingang des Zählers, erhält man die doppelte Entfernung, weil die Frequenz halbiert und die Periodendauer verdoppelt wurde. Der Messbereich ist dann 20 cm. Für die Oszillatorausgänge Q7 und Q8 verdoppelt sich die Reichweite jedes mal in gleicher Weise, also auf 40 bzw. 80 cm. Der Zählumfang des Zählers wird mit einem UND-Glied auf 10 festgelegt. Es setzt den Zähler bei Erreichen der 9 auf 0 zurück. zurück WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Setzimpuls Rücksetz-impuls S R Q S T Q R Q t MP1 tL tL Zusammenhang zwischen der Speicherzeit des FF und der Laufzeit des US-Signals Zeitgleich mit dem Aussenden des US-Impulses wird das FF gesetzt. Das Echo des US-Impulses setzt das FF zurück. Usw., usf. Die an MP1 messbare Zeit tL ist die Laufzeit des US-Impulses für den Hin- und Rücklauf. Sie ist der Entfernung des Gegenstandes proportional. RS-FF Beispiel: Für einen Gegenstand, der 0,2 m entfernt steht, lässt sich die Laufzeit wie folgt berechnen. v = 340 ms-1 s = 2 ·0,2 m = 0,4 m Die weitere Aufgabe besteht darin, die Laufzeit so auszuwerten, dass sie angezeigt werden kann. zurück WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
S & Impuls von Q14 (0,25 ms) Q & Q R Q geht in den H – Zustand über. zurück RS - Flipflop Die Funktion des RS-FF besteht darin, die Zeit zwischen der Ausstrahlung des Impulses und dem Empfang der Reflektion festzuhalten. Nach der Laufzeit tL des US- Impulses vom Lautsprecher zum Hindernis und dem Echo vom Hindernis zum Mikrofon gelangt der Impuls vom Komparator an R und setzt das FF zurück. Die gesetzte Zeit des FF ist der Laufzeit des Impulses und damit der Strecke proportional. Dieser Vorgang wiederholt sich aller 16 ms, also mit einer Frequenz von etwa 62 Hz. WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
10p 10p 47k 33k 10k - + - + - + 100n 10n 220 47k 10 10 100n zurück zurück US-Mikrofon-Impulsverstärker Komparator Ein OP ohne Rückkopplung wirkt wegen seiner hohen Verstärkung als Komparator. 180k 10k Der Komparator schaltet seinen Ausgang beim 1. verstärkten 40 kHz-Impuls nach H um. Im Ruhezustand liegt der Ausgang des Komparators auf L. Der Spannungsteiler 47k, 220, 47k legt die Arbeitspunkte für die OPs fest. Die nach Masse geschalteten Kondensatoren sind Siebkondensatoren. Die OPs arbeiten im invertierten Betrieb. Die 10p – Kondensatoren begrenzen die obere Grenzfrequenz der Verstärker. WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
C1 C2 & & ua R1 R2 G1 G2 US – Oszillator: f = 40 kHz Für die Frequenz f der Ausgangsspannung Ua gilt: Das Tastverhältnis der Impulse soll 1 : 1 sein. Es wird ein Kondensator mit C = 1 nF ausgewählt. zurück WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Binärteiler Q14 Q8 Q7 Q6 Q5 Oszillator 500 kHz & Reset UQ14 ca. 16 ms Das Impulsdiagramm von Q14 zeigt den Verlauf der Spannung. 0,25 ms t IC1: CMOS 4060 14-stufiger Binärzähler mit internem Oszillator Die Oszillatorfrequenz ist auf f = 500 kHz festgelegt. Funktion: Taktgenerator für den Arbeitsrhythmus des Ultraschall-Abstandsmessers Die Frequenz f = 500 kHz wird heruntergeteilt und liegt an den Ausgängen Q1 bis Q14 an. Berechnung der Frequenzen Q14 besitzt den Teilerfaktor 214 = 16384. Die Frequenz f an Q14 beträgt: Für die Periodendauer T gilt somit: Damit ergibt sich beim Tastverhältnis 1:1 eine Impulsdauer von etwa 16 ms. Der Ausgang Q8 liefert Impulse mit f = 1,953 kHz. Die Periodendauer beträgt 0,51 ms. Der Impuls hat dann eine Länge von etwa 0,25 ms. Ein UND-Glied realisiert, dass bei H an Q14und an Q8 Zähler auf 0 gesetzt wird. Danach dauert es ca. 16 ms, bis Q14 wieder für 0,25 ms H-Pegel führt, zurück WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
Potenzen, durch die die Oszillatorfre-quenz geteilt werden muss Periodendauer in ms Q1 Q2 Q3 Q4 Q5 Q6 Q7 Q8 Q9 Q10 Q11 Q12 Q13 Q14 FYO FYO 10 M FY1 22 k 0,51 500 kHz 22 p 22 p RESET 32 Frequenzen an den Ausgängen in kHz CD 4060 Teiler 250 125 62,5 31,25 15,635 7,813 3,906 1,953 0,977 0,488 0,244 0,122 0,061 0,031 21 22 23 24 25 26 27 28 29 210 211 212 213 214 2 4 8 16 32 64 128 256 512 1024 2048 4096 8192 16384 Oszillator 3. Dezimalstelle gerundet zurück WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO
WWU – Institut für Technik und ihre Didaktik – Hein/ Weber TEAM – Sensoren bei LEGO