Download
1 / 13
150 likes | 439 Views
Repeatability and control in nanoimprint lithography. Sarah Felix 4/14/08 EE C235 - Nanoscale Fabrication. Objective. Look at how lithography system components influence performance of nanoimprint lithography (NIL). Process overview. Parameters and cycle time. Translation speed, v t

E N D
Repeatability and control in nanoimprint lithography Sarah Felix 4/14/08 EE C235 - Nanoscale Fabrication
Objective Look at how lithography system components influence performance of nanoimprint lithography (NIL)
Parameters and cycle time • Translation speed, vt • Speed to contact template, vpress • Contact force, Fc • Hold time, thold • Exposure time, texpose • Release speed, vrelease • Alignment gap, d
Key sources of variation • Template fabrication • Physical contact • Resist accumulation • Degradation of anti-sticking layer • Uniformity or resist for spin-coated layers • Positioning and alignment methods • Overlay and pattern transfer • Force and parallelism
Repeatability study (2004) • Resist spin-coated over entire wafer • Over 1000 imprints without cleaning template • Measured resist thickness Residual resist thickness • Residual resist is most important • Don’t want too much overetching • Depends on initial resist thickness • +/- 8 nm variations (~ 2s) from local fluctuations • Systematic tilting error from passive compensation M. Otto et al., Microelectronic Engineering73-74 (2004), 152-156
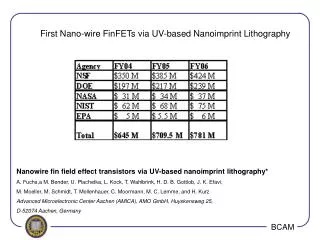
Repeatability study (2007) • Resist spin-coated over wafer • Over 100 imprints without cleaning template • Measure feature sizes to characterize critical dimension (CD) control • 3 s variation < 9nm • They conclude no gradual variations observed from adhesion, accumulations, etc.? Not so sure… M. Otto et al., Microelectronic Engineering84 (2007), 980-983
Stage control needs • X,Y, QZ • Overlay and pattern transfer • Minimize lateral motion during contact • Z, QX, QY • Parallel surface contact • Uniform contact force Z 6 DOF QZ QY Qx Y X
Passive vs. active compensation • Passive, compliant mechanisms control force across wafer • Various configurations possible • Disadvantages • Systematic errors • Variation in flexures • Causes lateral error if • rotation axis not in plane of template • template not at center of wafer • Not adequate for multi-step, multi-layer NIL H. Lan et al., Microelectronic Engineering84 (2007), 684-688
Types of stages • Linear motors for coarse control: high bandwidth, reduced nonlinearities • Fine control options • Flexure-based with piezo actuators • Reduced size, inertia, and friction • Poor dynamics due to coupling • Air bearing • Non-contact, so no backlash or stick-slip friction • Better dynamics, but lower stiffness and doesn’t handle dynamic loads well • Mag-lev • Resolves above issues, but high cost, requires complex control and has some physical limitations H. Lan et al., Microelectronic Engineering84 (2007), 684-688
Sensing for feedback • Considerations: Linearity, Resolution, Stability, Bandwidth, Cost • Laser interferometer typically used for position control • Types of gap sensing for force control • Capacitive • Interferometry • Ellipsometry • Spectral reflectometry H. Lan et al., Microelectronic Engineering84 (2007), 684-688
Conclusions • Step-and-repeat NIL is promising for high throughput • Critical dimensions are stable in the face of repeated physical contact • Positioning is most significant challenge for multi-step, multi-layer implementation • Sophisticated feedback control needs to be developed (e.g. Tomizuka @ Berkeley)