Download
1 / 17
260 likes | 1.35k Views
Per una rotazione intorno ad un qualsiasi asse z , vale la relazione:. “Assi principali di inerzia”. L // w. In generale ossia non vale la relazione vettoriale :. Gli assi di rotazione per i quali il momento angolare è parallelo all’asse di rotazione

E N D
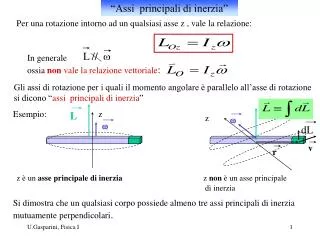
Per una rotazione intorno ad un qualsiasi asse z , vale la relazione: “Assi principali di inerzia” L // w In generale ossia non vale la relazione vettoriale: Gli assi di rotazione per i quali il momento angolare è parallelo all’asse di rotazione si dicono “assi principali di inerzia” Esempio: z L z w w dL v r z è un asse principale di inerzia z non è un asse principale di inerzia Si dimostra che un qualsiasi corpo possiede almeno tre assi principali di inerzia mutuamente perpendicolari.
Per una rotazione intorno ad un asse generico, la relazione tra il momento angolare L e la velocità angolare w è data dal“tensore di inerzia” (o “matrice di inerzia”) : “Tensore di inerzia” (j= 1, 2, 3 ) dove : momento d’inerzia del corpo rispetto all’asse x gli elementi diagonali della matrice di inerzia sono i momenti d’inerzia del corpo rispetto agli assi coordinati ;inoltre, per gli elemnti non diagonali: la matrice d’inerzia è simmetrica
z Gli elementi della matrice d’inerzia asse di rotazione r w y x e analoghe espressioni per L y , Lz .
Dato un asse di rotazione, è possibile scegliere un’asse coordinato (ad es. l’asse z) lungo la direzione di rotazione; in questo caso: l’espressione per il momento angolare: Momento anolare e matrice d’inerzia si semplifica : componente del momento angolare lungo l’asse di rotazione Tuttavia, essendo in generale il momento angolare ha componenti lungo gli assi x,y perpendicolari all’asse di rotazione, ossia L // w . , Se , l’asse z e’ un asse principale di inerzia. Un sistema di coordinate nel quale la matrice di inerzia è diagonale costituisce un sistema di assi principali di inerzia
Il momento d’inerzia I z’ rispetto ad un generico assez’ di rotazione passante per un punto O e individuato dal versore è esprimibile in funzione del tensore di inerzia Ijk : Teorema di Poinsot z z’ dm R r j O y x Izz Ixx Iyy
L’equazione che esprime il momento d’inerzia: “Ellissoide di inerzia” può essere riscritta, dividendo ambo i membri per : (1) con : la (1) è l’equazione di un ellissoide, detto “ellissoide di inerzia” del corpo rispetto al generico punto O del corpo: essa individua la superficie i cui punti coseni direttori dell’asse z’ sono a distanza dal punto O Il momento d’inerzia rispetto ad un qualsiasi asse z’ passante per un punto O del corpo è individuato dall’intersezione P dell’asse z’ con l’ellissoide d’inerzia del corpo mediante la relazione: Z z’ Ellissoide d’inerzia P Y O (“Teorema di Poinsot”) X
Dato un generico punto O del corpo, la forma ed orientazione nello spazio dell’ellissoide d’inerzia rispetto ad O e’ caratteristica del corpo e non dipende dagli assi coordinati ; solo il valore degli elementi della matrice d’inerzia dipende da questa scelta Ellissoide d’inerzia e assi principali Z Z’ z’ z’ Ellissoide d’inerzia P P Y O X’ O X Y’ equazione dell’ellissoide: , …ecc . , E’ sempre possibile “diagonalizzare” la matrice d’inerzia, ossia trovare un sistema di assi coordinati per il quale sia: equazione dell’ellissoide: Z X,Y,Z “assi principali d’inerzia”: per rotazioni intorno ad essi: Y (j=x,y,z) X
i) ellissoide d’inerzia di una sfera di raggio R: Esempi di ellissoide d’inerzia: R l’ ellissoide d’inerzia è una sfera corpo sferico omogeneo ii) ellissoide d’inerzia di un cilindro di lunghezza e raggio r : z r y x ellissoide d’inerzia corpo cilindrico
Rototraslazione di un corpo rigido di sezione circolare (disco,cilindro,sfera) su di un piano, per il quale il punto P (o i punti) di contatto tra il corpo ed il piano è fermo rispetto a questo ( Þ non vi è strisciamento ) Moto di “puro rotolamento” w y R vG G z x P Condizione cinematica: velocità del CM velocità relativa di P rispetto al CM velocità angolare di rotazione Derivando rispetto al tempo: accelerazione angolare
y w Moto di puro rotolamento (II) R F G f aG z x P Se una forza F viene applicata in G, nel punto di contatto P si sviluppa una reazione vincolaref che ha una componente lungo il piano: si ha cioè una forza d’attrito statico perchè si abbia un moto accelerato di puro rotolamento il piano d’appoggio deve essere scabro. Ciò è evidente dalla equazione del momento angolare rispetto al CM : Proiettando lungo l’asse z : è la forza d’attrito statico in P (l’unica che ha un momento rispetto a G) ad essere responsabile dell’accelerazione angolare del sistema richiesta perchè si abbia un moto accelerato di puro rotolamento.
Una forza d’attrito statico che agisce in un unico punto geometrico di contatto tra superfici indeformabili è una schematizzazione; in realtà si ha una deformazione delle superfici di contatto, lungo le quali si sviluppano reazioni vincolari la cui risultante ha una componente lungo la direzione del moto, detta “attrito volvente”: “Attrito volvente” G F f aCM aCM Þ x z Dal teorema del moto del CM: proiettando lungo la direzione del moto (asse x ) : ( si noti: Þ ) < 0. < F / M
Esempio: moto di puro rotolamento di un disco omogeneo di raggio R e massa M momento di inerzia rispetto all’asse z passante per G: y w z R F G f aG x P L’accelerazione aCM è inferiore a quella che si avrebbe per un punto materiale di massa M soggetto alla stessa forza F. Il lavoro compiuto dalla forza F in un tratto Dx : determina un aumento di energia cinetica sia di traslazione che di rotazione, mentre per un punto materiale:
La rotazione può essere considerata come rotazione istantanea intorno al punto fisso di contatto P : w y R F G f aG x z P Il teorema del momento angolare (calcolato rispetto al punto fisso P ), dà: con : Ciò permette di calcolare immediatamente a CM : e quindi f x : , come già trovato.
La forza d’attrito staticofx non sempre è opposta al moto; ad esempio, se la forza ‘motrice’ F è applicata nel punto A sulla sommità del disco: Forza d’attrito statico nel puro rotolamento y F A R G aG f z x P con:
“Giroscopio” : corpo rigido rotante con un punto mantenuto fisso da un sistema di vincoli; l’asse di rotazione, passante per il punto fisso, in generale varia la sua orientazione ed il moto risultante può risultare molto complicato. Giroscopio Se il punto fisso è il centro di massa e non esistono forze esterne aventi momento risultante diverso da zero rispetto ad esso: ( Þ le reazioni vincolari che sostengono il giroscopio hanno momento nullo rispetto al CM ) il momento angolare rimane costante: L G=costante Se l’assedi rotazione è un asse principale d’inerzia: w=costante Þ la direzione di rotazione rimane costante in un sistema inerziale : “bussola giroscopica” w “giunto cardanico” massa rotante z asse di rotazione (fisso in un sistema inerziale) z ’ y’ x ’
Se al giroscopio viene applicato un momento esterno si ha un “moto di precessione” del momento angolaree dell’asse di rotazione del giroscopio : Precessione e nutazione w G z P F LG moto di dLG precessione Se M G(E) = 0 ma l’asse di rotazione non è un asse principale d’inerzia ( ) l’asse di rotazione ruota intorno alladirezione costante di L : moto di “nutazione” Esempio: moto della Terra: l’asse di rotazione compie un moto di nutazione con periodo di 19 anni (l’angolo tra L ed w è comunque molto piccolo) w LG N S
Sotto l’ azione della forza peso: Esempio: moto di precessione di una trottola moto di precessione dj w dLO G LO J mg O O Þ “velocità angolare di precessione” la velocità angolare di precessione W è inversamente proporzionale alla velocità angolare di rotazione w della trottola