Download
1 / 17
170 likes | 194 Views
Explore the Optimum-Path Forest algorithm for efficient radar image classification in large datasets. Learn about pruning techniques to reduce training time and optimize classification processes.

E N D
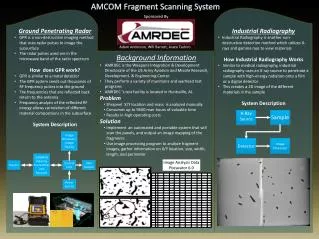
IEEE International Geoscience and Remote Sensing Symposium - IGARSS Is it possible to make pixel-based radar image classification user friendly? Rodrigo José Pisani1, Alessandra Rodrigues Gomes2 Paulina Setti Riedel1, Rodrigo Mizobe3, João Paulo Papa3 1UNESP – Geosciences and Exact Sciences Institute – Rio Claro, Brasil 2INPE – National Institute for Space Research – Belém, Brasil 3UNESP – Department of Computing – Bauru, Brasil Vancouver/Canada – July/2011
Talk outline • Introduction • Optimum-Path Forest • Pruning algorithm • Experiments • Qualitative results • Quantitative results • Conclusions
Introduction In this paper we would like to shed light the problem of efficiency and effectiveness of image classification in large datasets for the land use context; As the amount of data to be processed and further classified has increased in the last years; Several techniques have been designed to adapt the well succeed Support Vector Machines (SVMs) for large datasets. Recently, the Optimum-Path Forest (OPF) was proposed in order to provide graph-based pattern recognition algorithms with reduced training time (Papa et al., 2009).
Optimum-Path Forest Given a training set with samples from distinct classes, we wish to design a pattern classifier which can assign the true class label to any new sample (supervised classification); Each sample is represented by a set of features and a distance function measures their dissimilarity; The training samples are then interpreted as the nodes of a graph, whose arcs are defined by a given adjacency relation and weighted by the distance function.
Optimum paths are computed from the prototypes to each training sample, such that each prototype becomes a root of an optimum-path tree composed by its most strongly connected samples; Figure 1a: optimum-path forest generated over a training set.
In Figure 1b, one can see the classification process from a sample p (yellow node) of the evaluating set: p is connected to all nodes of the training set, and it is evaluated the training node tthat offered the optimum-path in Figure 1c. Figure 1b: classification of a sample p from the evaluating set. Figure 1c: p is conquered by t and receives the red label.
Pruning training samples Papa et al. (2009b) proposed an algorithm that prunes the training set by identifying irrelevant samples in a learning process and further removing them; This approach has demonstrated to be very efficient and effective in some applications, speeding up the OPF training and classification times.
In Figure 1d, all training nodes that participate from the classification process of p are marked with the black color. At the final of the whole classification step, the unmarked training samples are discarded from the training set. Figure 1d: all nodes from the optimum-path used to conquer p are marked with the black label.
Experiments • We conducted the experiments in two phases: • at first we evaluated OPF, SVM, Bayesian Classifier, and ANN-MLP over Alos Palsar image covering the area of Duque de Caxias – RJ (669000-7489000 east; 674000-7492000 south; orbit 220 point 76 datum 23 south hemisphere). For that we have used 50% for training and 50% for testing; • in the second round we have assessed the robustness of OPF with Pruning in regard to Radar-based image classification. For that we used the same 50% we used before, but now we have divided it in a new training and evaluating sets with 70% and 30% respectively.
Figure 2. Area of study – city of Duque de Caxias, RJ State.
Figure 3. ALOS PALSAR images used in the experiments covering the area of Duque de Caxias, RJ State. HH Polarization HV Polarization Each sample (pixel) is represented by HH and HV bands and by texture information given by a Gabor filter.
ALOS PALSAR IMAGE PROCESSING STEPS Original Alos Palsar Image (HH and HV) (without processing) Slant to ground range Change the image to sigma 0 Image Orthoretified Adaptative filter Lee 5 x 5 applied Image classification by OPF, SVM, BC and ANN-MLP Image rotulation (ground truth) Quantitative and qualitative comparison (Kappa values)
(Figures 3) there are four gray levels, which denote the following classes (ground truth): ALOS Palsar rotulated image Specular reflexion (plan areas with bare soil and dry areas) Difuse reflexion level I – (grass lands with few moist level) Difuse reflexion level II – (grass lands with average moist level) Volumeric backscattering (swampy and vegetation with very moist levels)
Qualitative Results a b c d ALOS-PALSAR images: (a) original, (b) ground truth, (c) classified by OPF and (d) classified SVM.
Quantitative Results Table 1. Mean accuracy and execution times for Alos Palsar. Table 2. Quantitative results for pruning classification.
4. Conclusions The experiments showed good recognition rates, which enabled the image classification with interesting visual results; We demonstrated that we can speed up the classification time, but the accuracy may be degraded up to a certain level, mainly because of some training samples pruning; Nowadays, we are looking to develop soft strategies for pruning, which may less affect the accuracy, but may be also slightly slower than the implementation used here, but still faster than not using pruning.
papa@fc.unesp.br pisani@rc.unesp.br THANK YOU! Try LibOPF and enjoy! www.fc.unesp.br/~papa www.ic.unicamp.br/~afalcao/libopf