Sparse, Brain-Inspired Representations for Visual Recognition
Sparse, Brain-Inspired Representations for Visual Recognition. Yair Weiss, CS HUJI Daphna Weinshall, CS HUJI Amnon Shashua, CS HUJI Yonina Eldar, EE Technion Ron Meir, EE Technion. Project Mission.

Sparse, Brain-Inspired Representations for Visual Recognition
E N D
Presentation Transcript
Sparse, Brain-Inspired Representations for Visual Recognition Yair Weiss, CS HUJI Daphna Weinshall, CS HUJI Amnon Shashua, CS HUJI Yonina Eldar, EE Technion Ron Meir, EE Technion
Project Mission The human brain can rapidly recognize thousands of objects while using less power than modern computers use in “quiet mode”. Although there are many neurons devoted to visual recognition, only a tiny fraction fire at any given moment. Can we use machine learning to learn such representations and build systems with such performance? We believe a key component enabling this remarkable performance is the use of sparse representations, and seek to develop brain-inspired hierarchical representations for visual recognition.
Research directions • Low power visual recognition - sparsitybefore the A2D: algorithms and theories for sparsification in the analog domain (Weiss & Eldar) • Extracting Informative Features from Sensory Input: an approach based on slowness (Meir & Eldar) • Sparsity at all levels of the hierarchy: algorithms for learning hierarchical sparse representations - from the input to the top levels (Weinshall & Shahsua)
Low power visual recognition • Research direction: Compressed Sensing for low power cameras • We have shown that random projections are poor fits for compressed sensing of natural images. We are working on better linear projections that take advantage of image statistics. • We want to explore nonlinear compressed sensing. • Optimizing projections for recognition, not for visual reconstruction. Weiss & Eldar
Extracting Informative Features from Sensory Input: Approach Based on Slowness • Sensory signals effectively represent environmental signals • Slow Feature Analysis extracts features based on slowness • The approach has been applied successfully to generate biologically plausible features, blind source separation and pattern recognition. • The SFA does not deal directly with representational accuracy • We formulate a generalized multi-objective criterion balancing representational and temporal reliability • Obtain feasible objective for optimization • Preliminary results demonstrate advantages over SFA • Future work: robustness, online learning, distributed implementation through local learning rules Ron Meir
Unified Framework for Instance and Class Recognition • Instance-based typically relies on similarity metrics • class-based recognition typically relies on statistical learning • Our goal:develop a unifieid statistical learning framework for both recognition tasks Cohen & Shashua object classes object instances
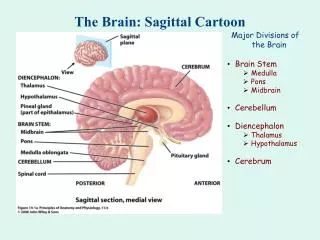
Hierarchical representation dominates Perception/Cognition: • Cognitive psychology: Basic-Level Category (Rosch 1976). Intermediate category level which is learnt faster and earlier as compared to other levels in the category hierarchy • Neurophysiology: Agglomerative clustering of responses taken from population of neurons within the IT of macaque monkeys resembles an intuitive hierarchy (Kianiet al. 2007)
Multi-task learning • Goal: jointly learn classifiers for a few tasks • Implicit goal: information sharing • Achieve more economical overall representation • A way to enhance impoverished training data • Knowledge transfer (learning to learn) • Our method: share information hierarchically in a cascade, whose levels are automatically discovered Publication: Regularization Cascade for Joint Learning, Alon Zweig and Daphna Weinshall, ICML, June 2013
An implicit hierarchy is discovered • How we compute the classifiers? Build classifiers for all tasks, each is a linear combination of classifiers computed in a cascade • Higher levels – high incentive for information sharing more tasks participate, classifiers are less precise • Lower levels – low incentive for sharing fewer tasks participate, classifiers get more precise • How we control the incentive to share? vary regularization of loss function
How do we control the incentive to share? • Regularization: • restrict the number of features the classifiers can use by imposing sparseregularization - || • ||1 • add another sparse regularization term which does not penalize for joint features - || • ||1,2 λ|| • ||1,2 + (1-λ)|| • ||1 • Incentive to share: • λ=1 highest incentive to share • λ=0 no incentive to share
Levels of sharing = + +
The cascade generated by varying the regularization Loss + || • ||12 Loss + λ|| • ||1,2 + (1- λ )|| • ||1 Loss + || • ||1
Algorithm • We train a linear classifier in Multi-task and multi-class settings, as defined by the respective loss function • Iterative algorithm over the basic step: ϴ = {W,b} ϴ’ stands for the parameters learnt up till the current step λ governs level of sharing from max sharing λ = 0 to none λ = 1 • Each step λ is increased The aggregated parameters plus the decreased level of sharing is intended to guide the learning to focus on more task/class specific information as compared to the previous step
Experiments Multi-task loss Multi-class loss • Synthetic and real data (many sets) • Multi-task and multi-class loss functions • Low level features vs. high level features • Compare the cascade approach against the same algorithm with: • No regularization • L1 sparse regularization • L12 multi-task regularization
Synthetic data 1 2 3 4 7 5 6 NoReg L12 T1 T3 T4 T2
Synthetic data H H L1 L1 100 tasks. 20 positive sample and 20 negative samples per task.
Synthetic data Step 1 output 100 tasks. 20 positive sample and 20 negative samples per task.
Synthetic data Step 2 output 100 tasks. 20 positive sample and 20 negative samples per task.
Synthetic data Step 3 output 100 tasks. 20 positive sample and 20 negative samples per task.
Synthetic data Step 4 output 100 tasks. 20 positive sample and 20 negative samples per task.
Synthetic data Step 5 output 100 tasks. 20 positive sample and 20 negative samples per task.
Results Average accuracy Sample size
Average accuracy Sample size
Real data Datasets Caltech 101 Caltech 256 Imagenet Cifar-100 (subset of tiny images)
Real data Datasets MIT-Indoor-Scene (annotated with label-me)
Features Representation for sparse hierarchical sharing: low-level vs. mid-level • Low level features: any of the images features which are computed from the image via some local or global operator, such as Gist or Sift. • Mid level features: features capturing some semantic notion. Classifiers over low level features.
Results Cifar-100 MIT indoor scene, ObjBank multi class Caltech 256, Gehler multi task
Online Algorithm • Main objective: faster learning algorithm for dealing with larger dataset (more classes, more samples) • Iterate over original algorithm for each new sample, where each level uses the current value of the previous level • Solve each step of the algorithm using the online version presented in “Online learning for group Lasso”, Yang et al. 2011 (we proved regret convergence)
Large Scale Experiment • Experiment on 1000 classes from Imagenet with 3000 samples per class and 21000 features per sample (ILSVRC2010) Accuracy data repetitions
Knowledge transfer A different setting for sharing: share information between pre-trained models and a new learning task (typically small sample settings). • Extension of both batch and online algorithms, but online extension is more natural • Gets as input the implicit hierarchy computed during training with the known classes • When given examples from a new task: • The online learning algorithms continues from where it stopped • The matrix of weights is enlarged to include the new task, and the weights of the new task are initialized • Sub-gradients of known classes are not changed
Knowledge Transfer Task 1 Task K MTL 1 . . . K = + + Batch KT Method Online KT Method α π π α π α K+1 K+1 K+1 K+1 = + + = + +
Knowledge Transfer (imagenet dataset) Synthetic data accuracy Sample size ILSVRC2010
Summary • We assume hierarchical structure of shared information which is unknown; hierarchy exploitation is implicit. • Describe a cascade based on varying sparse regularization, for multi-Task/multi-Class and knowledge-transfer algorithms. • Cascade shows improved performance in all experiments. • Investigate different visual representation schemes: better value in multi-task learning with higher level features • Different levels of sharing help and can be efficient.