Team GPS Rover
This project focuses on the design and implementation of a GPS-based rover that can autonomously drive, calculate its location, and avoid obstacles while transmitting telemetry data to users. Built on a Traxxas Rustler chassis, the rover integrates various sensors including GPS, a digital compass, and proximity sensors. The team has distinctly divided responsibilities, ensuring a structured approach to development. The project outlines objectives, an implementation plan, schedules, and a risk management strategy to mitigate potential challenges in technology integration and operations.

Team GPS Rover
E N D
Presentation Transcript
Team GPS Rover Alex Waskiewicz Andrew Bousky Baird McKevitt Dan Regelson Zach Hornback
Overview • Project Main Objectives • Outline of Approach • Implementation of Sub-Systems • Division of Labor and Responsibilities • Schedule • Risks and Contingency Plan
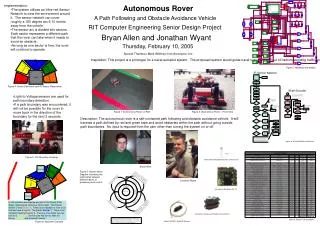
Baseline Functional Description • The human user will be able to drive the rover • Rover will calculate its location and bearing • Rover will transmit telemetry to the user • The user will command the rover • Rover will sense and avoid obstacles • Rover will autonomously maneuver to its assigned destination
Extended Functional Description • Rover could have onboard camera(s) providing visual feedback to user. • Rover could be able to carry and deploy instrumentation packages • Rocket launch platform • Environmental sensors • Mechanical Manipulator
VEHICLE • Traxxas Rustler • 445x311x178 mm • 1.69 kg • Top Speed 35 mph • $203 with batteries • High Load Capacity • Replaceable parts • Electronics Platform • Attaches to the chassis • Carries electronics, sensors, and batteries • Interfaces directly with car controls • Weight and Size are constraints
ELECTRONICS • GPS module • Digital compass • Proximity sensors • RPM monitors • Control block • 2-way RF communication link • Power system
Block Diagram GPS Module Digital Compass Proximity Sensors Control Block Laptop PC RF Link Wheel Encoders Motor
SOFTWARE • Vehicle control • GPS Interface • Coordinate Tracking • Pathfinding • Collision Avoidance & Sensors • Communication • Possible Reprogramability • Preserve stop functionality & remote programming • Receiver Transmitter Pairs
GPS Parts • Requires transmitter/receiver and interface board. • EM406 SiRF III Evaluation Board - RS232 - $30 • 20 Channel EM-406 SiRF III Receiver with Antenna - $60 • Concerns: Interfacing eval board with PC & resolution of GPS (10meters listed)
RF Link • 4800bps • UART • Analog or digital modes • $15 • Variable range with transmitted voltage • Sparkfun
Digital Compass • $60 • ½ degree resolution • I2C interface • Provides excellent tracking coordination with GPS sensor • http://www.sparkfun.com/commerce/product_info.php?products_id=7915
RPM Monitors • Measure speed and distance traveled • Along with Digital Compass provides backup and coordination with GPS tracking • Buy or Build? • Optical Encoder • Black and white “spokes” on inside of wheel
Programmable Logic • Xilinx CPLD or FPGA to sample sensors and place sensor data in external memory • May use extra logic to control motors if PWM block is inaccessible Sensor 1 Sensor 2 Sensor 3 Logic External RAM Microcontroller
Microcontroller • Required • Dedicated data and address busses to external memory • Wishlist: ability to “easily” interface with peripherals • Onboard ADC(s) • Onboard PWM • Onboard I2C module, or other serial communication protocol
Sensors • Use: 2 sensors, one forward, one downward • Provides obstacle avoidance and drop-off detection • Options: • Ultrasonic: Devantech SRF08 Ranger ($62) • 6m range • I2C interface • IR: Sharp GP2Y0A21YK ($12) • 80cm range • Analog interface • Sensor configuration
Power Subsystem • 2.5V, 3.3V, 5V systems (potentially) • Use of two 9V batteries in parallel: • Won’t need more than 9V, will provide sufficient energy • Use of 3 voltage regulators • Simple and cheap
ANDREW BAIRD DAN ZACH ALEX • Car Interface • GPS • CPLD • Software • Chassis Mount • Perf Board • RF Link • Power • Car Interface • Chassis Mount • Sensors • Organize Documents • Car Interface • Power • RPM Monitors • Digital Compass • GPS • Sensors • CPLD • Digital Compass • Software
Done In progress Not started
Risks and Contingency Plans • Parts availability and shipping times • Cost • Interfacing with the Car • Providing sensor data to the microcontroller • RF communication • Component failure