Download
1 / 40
831 likes | 1.87k Views
Prof Geraint F. Lewis Sydney Institute for Astronomy The University of Sydney. A Physicists’ Introduction to Tensors. Tensors. The Goals: Understand what a Tensor is Understand what a Tensor does Tensor Algebra Tensor Contractions The Metric Tensor Coordinates and Invariance

E N D
Prof Geraint F. Lewis Sydney Institute for Astronomy The University of Sydney A Physicists’ Introduction to Tensors
Tensors The Goals: • Understand what a Tensor is • Understand what a Tensor does • Tensor Algebra • Tensor Contractions • The Metric Tensor • Coordinates and Invariance • Tensor Calculus Typical undergraduate reaction to the word “Tensor”.
Scalars & Vectors Magnitude Magnitude and Direction
Scalars & Vectors Scalar Field: Temperature has one component per position. Vector Field: Fluid Velocity has three components per position.
Vectors & Components Must make a distinction between a vector and its representation in a particular coordinate systems. A vector in a particular Cartesian coordinate system will have a particular set of components. In a different Cartesian (i.e. rotated) coordinate system, the vector will be unchanged, but the components will be different. In fact, a change of coordinate system will, in general, result in a change of vector components. The vector, however, is coordinate independent.
Vectors & Notation We will use a new notation for the representation of a vector in a particular coordinate system: Here, α is an index and can take on the values of 1, 2 or 3 (when working in 3 dimensions). This extracts the particular component of the vector. This is often written as
Vectors & Notation With this, we can write a physical law in a coordinate independent fashion; Or in terms of the components of the vectors; Note that this expression is actually three equations (in 3D); or etc…
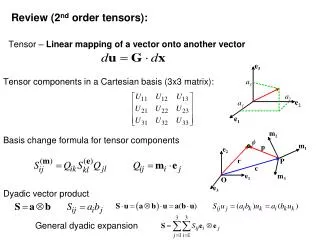
On to Tensors A tensor of rank 0 (no index) is a scalar. A tensor of rank 1 (one index) is a vector. But the converse is not generally true (more later). We can clearly generalize this and create a tensor of rank 2; This clearly has 3n=9 components.
Physical Example: Stress From Wikipedia
The Dot Product We can write a vector as where eare the basis vectors and we have made use of the Einstein summation convention; any repeated index must be summed over. With this, the dot product is where gαβ is the Metric Tensor.
The Metric Tensor In Cartesian coordinates, the metric tensor is simply And we can see that the magnitude (squared) of a vector is Note that the metric tensor is different in non-Cartesian coordinate systems, and tensors can have indicies `downstairs’ as well as up.
Metric Tensors For 3-D spaces, metrics are of the form Normally the metric is symmetric, so gαβ=gβα. Off-diagonal terms in the metric implies that the basis vectors are not orthogonal;
General Tensors A tensor of rank n in 3 dimensions has 3n components. These components can be referenced in terms of nindicies. But how do you know if the indicies go up-stairs or down-stairs? Suppose we have a rank 3 tensor, V, then we can actually describe it in a number of coordinate representations; Each is a valid coordinate representation. This important thing is to follow a few simple index rules.
Tensor Algebra Generally, tensors can be multiplied by a scalar to produce another tensor of the same rank Note that when considering the component representation, the indicies on both sides of the equation must be the same. Two incorrect tensor equations are;
Tensor Algebra We can also add tensors together, but again, they must be of the same rank. As before, in the component representation, the indicies must match. We can multiply tensors together to make new tensors Note that in the last example there is one free index, α, and so this represents three equations.
Tensor Contraction & Indicies We can construct tensors out of themselves through contraction. This reduces the number of indicies and so the rank of the tensor. So tensor algebra is straight-forward, but we still need to learn how to raise and lower indicies. The first step is the definition of the `inverse-metric’, defined such that
Raising & Lowering Indicies The metric tensor is a machine for raising and lowering indicies. This implies that the magnitude (squared) of a vector is But what are vector components with the index down-stairs? We need to consider coordinates and duals.
Physical Example We usually see the magnetic permeability as a scalar relating magnetic flux (B) and magnetization (H) through This simply scales the vector. For more exotic materials, the permeability; The result is that the vector is not only scaled, but also rotated (compare to cross product).
Vectors & Duals Let’s work on a 2-D plane. We can place a regular Cartesian coordinate system over the plane, and it’s easy to see that; With this, it should be clear that for any vector in the plane, then the components of the vector are; What does this mean? Remember, these are components of a vector, and so;
Vectors & Duals We can write the vector in terms of its up-stairs (contravariant) components or down-stairs (covariant) components, so; The first e‘swe are familiar with, this are simply our basis vectors. The second e’s are the basis of our dual vectors. But the metric and its inverse are the same, so the vector and dual bases are the same, and the components of the vector and dual vector are the same. This is true in Cartesian coordinates, but what about in general.
Coordinate Transformations Let’s start by considering a little displacement vector in Cartesian coordinates; What is the length of this vector? Clearly, However, the length of a vector does not depend on the underlying coordinate system, i.e. it is an invariant. What if we change to polar coordinates?
Coordinate Transformations The transformation between polar and Cartesian coordinates is and it is simple to show that the length of a displacement vector is given by; This implies that the metric (and inverse) are given by
Coordinate Transformations This immediately implies that the basis vectors in the θ-direction change. • For vector representation (Vα), the θ-basis increases with r. • For dual representation (Vα), the θ-basis decreases with r. Hence, the components of the vector and dual vector, which is just the projection of the vector onto the bases, cannot be the same (except at r=1). But this illustrates the only difference in a tensor index being upstairs or downstairs is projection on to vector or dual basis.
Coordinate Transformations What was the point of all of that? Well, as we noted at the start, vectors (and tensors) are coordinate independent things, and so our laws of physics must also be coordinate independent (they are invariant). You should be surprised is a physical prediction made in Cartesian coordinates was different to the prediction made in polar coordinates. Writing physical laws in tensorial form will be coordinate independent because of the way they transform.
Coordinate Transformations Transforming tensors is straight-forward and simply uses components of the Jacobian. For an up-stairs vector, the transformation is; Note that the indicies match. So between polar and Cartesian, the components of a vector change as and a similar expression for y.
Coordinate Transformations For more indicies, we have more transformation terms; But what about down-stairs indicies? Easy
Transforming Physical Eqns Let’s consider we have a physical law in one coordinate system; Let’s transform to another coordinate system Excellent! Tensorial form in one coordinate system is the same as any other (we have a covariant form).
Tensor Calculus Of course, algebra is only part of physical law. What we also need is tensor calculus. Consider a particle on a 2-D plane at the position (1,1) in Cartesian coordinates. Also suppose it has a velocity; and no acceleration. What is it’s motion as a function of t?
Tensor Calculus What if we repeat the problem in polar coordinates? We can easily transform the initial position: and we can use our tensor rules to transform the velocity and a similar expression for θ. With this we get
Tensor Calculus We are told there is no acceleration, so I guess that means the velocity doesn’t change, so we must have equations of motion of the form; Plotting this on the Cartesian plane gives; Clearly, something is wrong!
Covariant Derivative The problem is the derivative. Derivatives of scalars are OK as they are coordinate independent, but we have a problem with the components of vectors (and tensors in general). If we think about a 2-D polar coordinate system, then moving a vector that maintains its magnitude and direction will, in general, change the vector components. We need a definition of the derivative that can account for these change in components as the vector (or tensor) moves across the coordinate system; this is the covariant derivative.
Covariant Derivative The covariant derivative of a vector, vα, is where the comma is a partial derivative, and the Γ is a Christoffel symbol and is given by As these depend upon derivatives of the metric, it should be clear that in Cartesian coordinates these are all zero.
Covariant Derivative Derivatives of higher rank tensors requires an additional Christoffel symbol for each contravariant index; For covariant (down-stairs) indicies, the covariant derivative is the same, except with a minus sign; Note, Christoffel symbols are not tensors!
Covariant Derivative The covariant derivative transforms like a tensor. So, the definition of a tensor which does not “change” when you move from one place to the other is; If the the covariant derivative is not zero, then the vector changes (either magnitude, orientation or both). If this was a velocity vector, a non-zero covariant derivative this would mean that there was an acceleration acting.
Covariant Kinematics Suppose we have a particle undergoing an acceleration, a, with particular initial conditions. What are the equations of motion in a general coordinate system? At each point along its path, we can define the velocity to be; The position is not a vector, but the velocity is. So;
Non-Tensors We can define a scalar field that is not a tensor. A simple example is “the distance between the point of interest and the origin of the coordinate system”. Clearly, if I define a new coordinate system with a different origin, the value of the scalar field at a particular point will change. Hence, not all scalars, “vectors”, or generally collections of numbers, are not tensors. They do not transform correctly.
Where will I need this? 3-D tensors (often considered in Cartesian form only) appear in EM, mechanics (stress & strain), fluid mechanics, etc. Moving to special relativity (4-D space-time) we use vectors with 4-components, such that a 4-velocity is; with the Minkowski metric; Note, spatial part of metric has Cartesian coordinates.
Where will we need this? Combing EM and SR, we get the covariant form of the EM which is based upon the Maxwell tensor. with Maxwell’s equations being
Where will we need this? Much of life is made easy with Cartesian coordinates, with equal vectors and duals, and zero Christoffel symbols. This leads to sloppy handling of indicies. Once place you cannot be sloppy is in General Relativity, where we deal with physics on a curved “manifold” with messy coordinates. Respecting your indicies makes it a lot easier.
The End See you in GR In Week 2