Download
1 / 18
420 likes | 1.15k Views
Submarine Inertial Navigation System (INS). Team Members: Ernest Yang, Nate Fisher, Chris Branson, James Yang. Georgia Institute of Technology ECE4007 Spring 2007. Project Goals. Inertial Navigation System:

E N D
SubmarineInertial Navigation System (INS) Team Members: Ernest Yang, Nate Fisher, Chris Branson, James Yang Georgia Institute of Technology ECE4007 Spring 2007
Project Goals • Inertial Navigation System: • A device to determine navigation data (position, velocity, heading, etc.) for underwater operation • Submarine will participate in a NAVY-sponsored competition (no GPS allowed) ECE4007 Spring 2007 Submarine INS
Specifications 3 ECE4007 Spring 2007 Submarine INS
Projected and Actual Budget Projected Budget: 6DoF IMU- $325 DsPic30F3013- $10 Misc. Components (resistors, caps, board, etc)- $30 Total so far: $365 Final Budget 6DoF IMU- $325 DsPic30F3013- $10 Misc. Components (resistors, caps, board, etc)- Free Project Total: $335 4 ECE4007 Spring 2007 Submarine INS
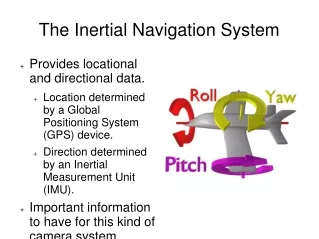
Project Background • 6 Degrees of Freedom (DoF): • 3 linear translations: x, y, z • 3 angular rotations: roll, pitch, yaw ECE4007 Spring 2007 Submarine INS http://www.grc.nasa.gov
Position Calculation • Two coordinate systems: Navigational Frame Earth Frame ECE4007 Spring 2007 Submarine INS
Position Calculation • Orientation change is from integration • Translation is from integration • Rotation matrix computed from orientation (mixed angles) • Provides “clean” method of calculating translation in “Earth” frame ECE4007 Spring 2007 Submarine INS
Leading Sources of Error • Sensor sample rate is 10 ms • Sensor “strap-down” mechanics • Rotation coordinates kept orthogonal via software correction • Estimation drift realized via integration of noise for long periods ECE4007 Spring 2007 Submarine INS
Submarine-To-INS Protocol • Similar to Ethernet Packet - Preamble (4 bytes) - 5 bytes for state components and 2 bytes line feed and carriage return - 12 state components - 18 byte check sum - ASCII output ECE4007 Spring 2007 Submarine INS
Key Components 6DoF Inertial Measurement Unit (IMU) One Freescale MMA7260Q Triple-Axis Accelerometer Three Analog Devices ADXRS150 Gyroscopes dsPIC30F Microcontroller Two UART connections ICSP connection ECE4007 Spring 2007 Submarine INS
ICSP Connector 6 Pin Header Submarine Data Input ICSP Circuit dsPIC30F PGD/PGC U1RX/TX U2RX/TX Vdd 5V Voltage Regulator Jumper Switch IMU Data Input External Power Source 9V Battery Interconnects and Interfaces ? ECE4007 Spring 2007 Submarine INS
Current Status dsPIC30F ICSP Header IMU Connector (UART) MAX232 TTL/RS232 Convertor Submarine Connector (UART) ECE4007 Spring 2007 Submarine INS
Status : Completed Tasks • Hardware • Prototype Built on a Breadboard • Final Circuit Board Built • Successfully Communicates with PC at 56k baud rate or below. (MRG requested 36.6k or below.) • dsPIC30F Software Upgradeable using ICSP headers • Software • Submarine-to-INS Message Generator and Parser • Time devoted to fixing the communication problem ECE4007 Spring 2007 Submarine INS
Schedule: Completed Tasks 15 ECE4007 Spring 2007 Submarine INS
Status : Incomplete Tasks • IMU to dsPIC30F Communication • Working with Manufacturers • Instead of Kalman filter, Low Pass filter will be used. ECE4007 Spring 2007 Submarine INS
Status : Problems • IMU Arrived ~4 Weeks Late • Lack of experience with dsPIC30F • Very small support community • Unresolved Forum Entries • Very few examples ECE4007 Spring 2007 Submarine INS
What We Would do Differently • Contingency Planning • Secondary supplier to ensure a timely delivery • Better Workload Management • Divide up the work more evenly • Time Budget Analysis • Allocate more time to experimenting with components • Allocate time for unforeseen delays ECE4007 Spring 2007 Submarine INS