Download

1 / 20
200 likes | 359 Views
Portable Control & Measurement Device. Yotam Vit Karinne Attali. Supervisor: Boaz Mizrachi ( Zoran ) . The PCD:. Portable & user friendly Low-priced Versatile & multi-purposed Measure and display results instantly Store data for later re-evaluation Control over environment

E N D
Portable Control & Measurement Device YotamVitKarinneAttali Supervisor: Boaz Mizrachi (Zoran)
The PCD: • Portable & user friendly • Low-priced • Versatile & multi-purposed • Measure and display results instantly • Store data for later re-evaluation • Control over environment • Customization and extension of feature-set in HW & SW
Project goals • Self-learning process: • Data sheets, schematics, HW & SW, MPLab • Assemble & HW debug • Sensors debug and driver implementation • Multiple devices production – 9 boards • Boxes production • Main menu improvement • BOM & inventory management
Main Menu • PCD voltage shows battery value. • Dcdc opens automatically when needed. • Dcdc and all related sensors turn off when temperature sensor is on. • Each menu has different sensors according to what is assembled on its board.
Accelerometer A micro-machined device measuring static acceleration. Output voltage alternates according to 3 dimensional axis.
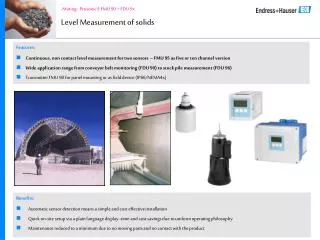
Pressure פישבך קומה 13 A silicon sensor measuring absolute pressure. Output voltage can be converted to pressure by: פישבך קומה 1
Buzzer for (b=0;b<9000;b++){} for (b=0;b<18000;b++){ if ((b%100)==0) MCU_AUX_BUZZER = !MCU_AUX_BUZZER; } for (b=0;b<9000;b++){} for (b=0;b<18000;b++){ if ((b%190)==0) MCU_AUX_BUZZER = !MCU_AUX_BUZZER; } An electronic audio device working by alternating on and off the signal source given by the PIC, thus creating different frequencies which give a big array of sounds.
UV Full sun light A “Shotki” photodiode for UV sensing. The sensor is brought to the surface of the box in order to efficiently absorb all UV rays. Max value in full UV exposure is 3.3. Shadow Through window
IR IR transmitter/receiver. Receiving function is checked using ISR due to high frequencies.
Magnetic Measures the earths’ magnetic field. Nickel-iron strips change their voltage in presence of a magnetic field. Output voltage alternates according to 2 dimensional axis.
Optic A CMOS optic sensor that decides on direction of movement by taking 1700 frames per second and comparing them. The sensor needs an external led and prism to work. Output voltage (“1”/”0”) needs to be processed in a FSM. 2 outputs for each direction.
Optic FSM:
Optic • In order to meet the nyquist condition sampling must occur every 30 microsec. • Sampling in the main func occurs every 30 milisec. • There is a need for a short ISR every 30 microsec of the main func. • Entrance to ISR is made by “Timer 0” . • Only sampling inside the ISR
Optic void isr_timer0(void){ A=SENS_MCU_MOUSE_X1; B=SENS_MCU_MOUSE_X2; C=SENS_MCU_MOUSE_Y1; D=SENS_MCU_MOUSE_Y2; current_byte = D + (C << 1) + (B << 2) + (A << 3); if ((current_byte ^ last_byte)) { OPT[w]= current_byte; last_byte = current_byte; w=(w+1); } } ISR must be shorter than the timer, therefore only a minimal number of actions are made inside. • Sampling sensor output. • Comparing to last value saved in array. • Saving new value in array, only if changed. FSM and the decision about what direction to move to are done in the main func.
Multiple devices production • Common malfunctions: • Design mistakes • Assemble mistakes • Defective components • Short/open circuit • Borderline design • Unexpected high “Pic” resistant • Out of range “Pic” input voltages
Multiple devices production • Locate malfunctions: • Visual check • Voltage measure using Scope • Comparison to proper boards • Confirmation with “Data Sheet” • Resistant measurement w/o component • Disconnect (“lifting”) components (“legs”) • SW
3 batteries missing – fund alternative Status Report
Future improvements • Improvements and amplifier for the microphone • Optic sensor: • Add speed detection • integration to the main menu (change timer) • Clock • Improvement of buzzer resolution • Case for buttons • Additional memory
Future applications • GUI for PC • IR - remote control • IR + microphone – volume control • Optic – digital ruler • Optic – OCR • Accelerometer – digital leveler • Accelerometer – angle gauge • UV + buzzer – high radiation indicator