第五章 前馈控制系统 Feedforward Control
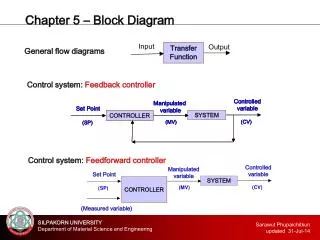
第五章 前馈控制系统 Feedforward Control. 5.3 前馈控制系统设计. 内 容. 前馈控制的原理复习 静态前馈控制的设计方法 前馈控制系统的动态补偿 前馈反馈控制系统 仿真举例. 前馈控制的概念. D 1 ,……, D n 为可测扰动; u , y 分别为被控对象的操作变量与受控变量。. 前馈思想 :在扰动还未影响输出以前,直接改变操作变量,以使输出不受或少受外部扰动的影响。. 前馈控制方块图. u ( t )、 y ( t ) 分别 表示控制变量与被控变量; d ( t ) 表示某一外部干扰 ;

第五章 前馈控制系统 Feedforward Control
E N D
Presentation Transcript
第五章 前馈控制系统Feedforward Control 5.3 前馈控制系统设计
内 容 • 前馈控制的原理复习 • 静态前馈控制的设计方法 • 前馈控制系统的动态补偿 • 前馈反馈控制系统 • 仿真举例
前馈控制的概念 D1,……,Dn为可测扰动;u,y分别为被控对象的操作变量与受控变量。 前馈思想:在扰动还未影响输出以前,直接改变操作变量,以使输出不受或少受外部扰动的影响。
前馈控制方块图 u(t)、y(t) 分别表示控制变量与被控变量; d (t)表示某一外部干扰; GYD(s)、GYC(s)分别为干扰通道与控制通道的动态特性; GFF(s)为前馈控制器的动态特性。 控制目标:
前馈不变性原理 • 动态不变性:在扰动d(t)的作用下,被控量y(t) 在整个过渡过程中始终保持不变,称系统对于扰动d(t)具有动态不变性,即Y(s)/D(s) = 0,(调节过程的动态和稳态偏差均为零,”理想情况“)。 • 稳态不变性:在干扰d(t)作用下,被控量y(t)的动态偏差不等于零,而其稳态偏差为零,即Y(0)/D(0) = 0,或者说y(t) 在稳态工况下与扰动量d(t)无关。
静态前馈控制 • 控制目标:保证过程输出在稳态下补偿外部扰动的影响,即实现“稳态不变性”。 • 静态前馈控制方式: • 线性静态前馈: • 非线性静态前馈:结合对象静态模型获得前馈控制器结构与参数。
非线性静态前馈控制 稳态平衡关系: 讨论: 前馈控制器的实现与相关测量仪表的影响
前馈控制算法 假设T1、T2的测量范围为[T1min, T1max]、[T2min, T2max], RV、RF的测量范围为[0, RVmax]、[0, RFmax];而各测量信号T1m、T2m、 RVm、RFm及设定值均为0 ~ 100 %.
换热器动态仿真模型 (参见模型…/FFControl/ExHeater.mdl) 静态工作点: T1=20℃, RF=10 T/hr, RV=2T/hr, Kv=800, T2=180℃. T2仪表量程为100~300℃, RV仪表量程为0~5 T/hr. 干扰通道纯滞后可忽略, 控制通道纯滞后为2.5 min.
换热器的静态前馈控制器 假设静态工作点为: T1=20℃, RF=10 T/hr, RV=2T/hr, Kv=800, T2=180℃. T2的测量仪表量程为100 ~ 300℃, RV仪表量程为0 ~ 5 T/hr,T1量程为0 ~ 50℃, RF仪表量程为0 ~ 20 T/hr. 则其静态前馈控制算法为
换热器静态前馈控制仿真 讨论:分析稳态不变性原理以及系数Kvm对前馈控制性能的影响,(参见模型…/FFControl/ExHeaterStaticFFC.mdl)
前馈控制的动态补偿 讨论:当控制通道与扰动通道的动态特性差异较大时,需要引入动态补偿。对于线性系统,动态补偿算法为 这里,gYD(s)、gYC(s)分别表示通道特性的动态部分,其稳态增益均为1。
非线性系统的动态前馈补偿 对于线性系统,动态前馈控制器可表示成静态与动态两部分: 其中 对于非线性系统,上式中静态前馈部分可由对象的非线性静态模型计算得到,而动态部分同样可按线性对象处理。动态前馈补偿的一般形式为
换热器的前馈反馈控制方案2 特点:可克服对象的非线性,或具有变增益控制器的功能。
换热器反馈控制系统举例 (参见模型…/FFControl/ExHeaterPID.mdl)
换热器前馈反馈控制系统 #1 (参见模型…/FFControl/ExHeaterFFC_PID1.mdl)
换热器前馈反馈控制系统 #2 (参见模型…/FFControl/ExHeaterFFC_PID2.mdl)
结 论 • 引入前馈控制的可能应用场合: (1)主要被控量不可测; (2)尽管被控量可测,但控制系统所受的干扰严重, 常规反馈控制系统难以满足要求。 • 应用前馈控制的前提条件: (1)主要干扰可测; (2)干扰通道的响应速度比控制通道慢,至少应接近; (3)干扰通道与控制通道的动态特性变化不大。
练习题 下图所示的换热器采用蒸汽加热工艺介质,要求介质出口温度达到规定的控制指标。试分析下列情况下应选择哪一种控制方案,并画出带控制点的流程图与方块图。 (1)工艺介质流量GF 与蒸汽阀前压力PV 均比较稳定; (2)介质流量GF 比较稳定,但压力PV 波动较大; (3)蒸汽压力PV 比较稳定,但介质流量GF 波动较大。

![Motor[x].Servo.Kp Proportional Gain (K p ) Motor[x].Servo.Kvfb Derivative Gain (K d )](https://cdn3.slideserve.com/6155616/slide1-dt.jpg)