Problemas
Problemas. FJ. Molina. A. Ariel Gómez. J. Barbancho Departamento de Tecnología Electrónica Universidad de Sevilla (SPAIN) 2010 Asignatura de Automatización Industrial E. U, Politécnica. Resumen. Control de ejecución de POUs Errores frecuentes Conclusiones. Diseño de POUs. Problema 6.1.


Problemas
E N D
Presentation Transcript
Problemas FJ. Molina. A. Ariel Gómez. J. Barbancho Departamento de Tecnología Electrónica Universidad de Sevilla (SPAIN) 2010 Asignatura de Automatización Industrial E. U, Politécnica
Resumen • Control de ejecución de POUs • Errores frecuentes • Conclusiones
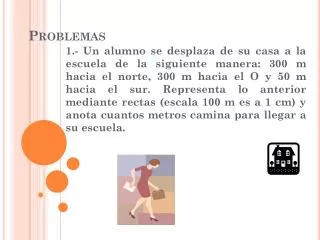
Problema 6.1 • La figura representa el SFC de un bloque funcional que controla el ciclo de producción de una instalación industrial. Se desea añadir un modo de parada de producción (al final del ciclo), para lo que se deberán explorarse diferentes alternativas. Modifique el SFC según sea necesario. • Se utilizará un selector como el que se muestra. • Empleando pulsadores, aunque de modo que la orden de parada pueda ser revocada antes de que el proceso alcance el final del ciclo. • Repita el apartado B de modo que no sea posible anular la orden de parada. • Empleando pulsadores, y ejecutando una parada rápida del proceso.
Problema 6.1 • 1) Empleando un selector • Desde S1, la secuencia comienza con Ciclo. • Continúa ininterrumpidamente hasta que Ciclo := 0
Problema 6.1 • 1) Empleando un selector • Señalización: • FC .– Fin de Ciclo • STOP .- Parada obtenida • PS .- Parada solicitada • Servicio.- En producción
Problema 6.1 • 2) Empleando pulsadores, aunque de modo que la orden de parada pueda ser revocada antes de que el proceso alcance el final del ciclo • El uso de pulsadores implica memorización • Sol: programa LADDER en las operaciones permanentes de entrada del SFC • No es recomendable porque “oculta visualmente” del SFC la existencia de dos estados o modos funcionales: Marcha/Paro • Además: la secuencia no se detiene al cambiar a parada – Se trata de una PARADA DE FIN DE CICLO
Problema 6.1 • 2) Empleando pulsadores, aunque de modo que la orden de parada pueda ser revocada antes de que el proceso alcance el final del ciclo • Solución mediante SFCs coordinados • El primero gestiona el modo del automatismo • El segundo controla la secuencia de trabajo.
Problema 6.1 • 3) Repita el apartado B de modo que no sea posible anular la orden de parada. • Secuencia de espera mutua • Una vez en parada, sólo es posible entrar en CICLO si la secuencia principal ha alcanzado el estado de parada inicial.
Problema 6.1 • 4) Empleando pulsadores, ejecutando una parada rápida del proceso. • Sale en cualquier instante ante condición de parada