Gear Bearing Technology
Gear Bearing Technology. Group 14 October 29, 2003. Pamela Carabetta Marisa Jenkins Sarah Kovach-Orr Anuja Mahashabde Qi Yan. Summary. Need for improvement on existing planetary gear transmissions Gear bearings provide a solution to problems associated with planetary gears

Gear Bearing Technology
E N D
Presentation Transcript
Gear Bearing Technology Group 14 October 29, 2003 Pamela Carabetta Marisa Jenkins Sarah Kovach-Orr Anuja Mahashabde Qi Yan
Summary • Need for improvement on existing planetary gear transmissions • Gear bearings provide a solution to problems associated with planetary gears • Apply gear bearings to space technology • Usefulness of potential product to NASA for space exploration
Project Management • Pam • Gears and Transmissions/Gear Bearings • Rover Concept • Weekly E Mails • Marisa • Robotic Arms • Improve Existing Robot Concept • Two-Dimensional Gear Bearing Concept • Sarah • Patent Search • Robot Arm Concept • Selection Matrix • Anuja • Motors • Robot Wrist/Hand Concept • Qi • Website Manager • Robot Wrist/hand Concept
Project Timeline October 2003 Project Selection Identifying customer needs Background research Patent search Brainstorming and Project specifications Midterm Project Presentation November 2003 Design Specifications Final Design Parameters Initiate computations Safety considerations Costs research December 2003 Final CAD drawings Finish Computations Finite Element Analysis Final Project Presentation January 2004 Begin Machining Continue modifications if necessary February – March 2004 Test prototype Make corrections May 2004 Make final prototype Final Project Presentation
Gears • Function to reduce speed, reverse direction of rotation, and change axis of rotation • Gear Geometry: pitch, ratio, backlash (efunda.com, 2003)
Planetary Gears • Transmit higher torque • Low-backlash • Distributed load (longer life) • Works well with high-speed inputs (ideal for motors) • Limitations: small gear ratio, size, weight, cost
Gear Bearings • Advantages over planetary gears: • Phase-shifted for greater speed reduction • Lighter • Smaller • Cheaper • Stronger • Smoother (ASME Magazine, 2003)
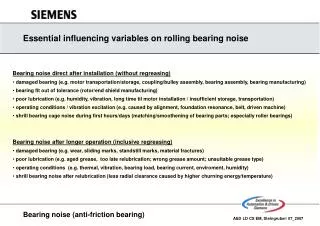
Motors • Motor dynamics • Interaction with planetary gear or Gear Bearing (Seimens.com, 2003)
Robotic Arms • Example: Canadarm2 • Robotic Arms can assist in repairing parts of the ship, docking, transportation • Offers advantages over human alternative: more accurate, stronger, involves less risk NASA: Educational Brief, 2001
Existing Robotic Arm • Replace planetary gear in an existing robotic arm with a Gear Bearing • Compare specifications of robotic arm to performances achieved with Gear Bearing. (Hobbytron.com, 2003)
Rover • Gear Bearing Technology would allow for a smaller motor to be used that would create high torque • Potential device would be able to travel rough surfaces
Multidimensional Gear Bearing • Would allow for one motor to be used to create movement in multiple directions • Device would still retain the advantageous properties of the standard Gear Bearing
Robotic Arm • Device would consist of two major components: • Large arm for gross motion • Small hand for fine motion • Gear Bearing used in hand for higher level of precision
Robotic Wrist and Hand • Combines two ideas: • Multidimensional Gear Bearing • Robotic Hand • Multidimensional Gear Bearing would be applied to the wrist • Hand would utilize current Gear Bearing
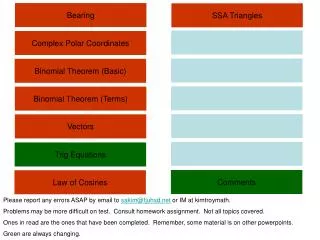
Existing Robotic Arm Rover Multidimensional Gear Bearing Robotic Arm Robotic Wrist and Hand Predicted Quality of End Product 1.)Referring to lab capabilities 2.)Referring to group’s capabilities 3.)Referring to time frame 1 4 4 4 3 5 3 2 2 4 3 4 5 5 3 Meaningfulness 1.)To group members 2.)To NASA 3 1 0 2 4 5 3 3 5 4 Risk of Failure 3 2 1 3 2 Challenge to Group 2 4 5 4 5 Market Need 1.)Application to NASA 2.)Application to Robotics Industry 1 1 4 2 5 5 3 3 4 4 Cost 4 1 5 4 4 Total 24 27 37 34 39 Selection Matrix
Thank you Acknowledgements: Advisors: Kathryn De Laurentis, Mircea Badescu, & Prof. Dinos Mavroidis Mr. John Vranish & Goddard Space Flight Center