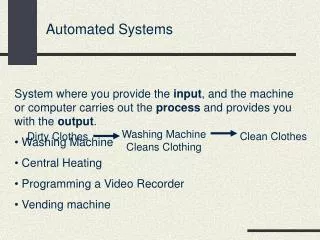

Automated Systems
E N D
Presentation Transcript
Automated Systems Lesson 3: Getting the Robot to do work
Lesson 3: Automated Systems By the end of this lesson you will be able to: • Identify what the controlling computer does. • Explain what a control program is. • Explain what a sensor is. • Explain why sensors are needed. • Explain the term feedback. • Explain what happens to the feedback. • Explain why an interface is required. • Explain the term analogue signal. • Explain the term digital signal • Explain what a AD to DA converter does.
Lesson 3: Automated Systems Controlling Computer Controlling Computer • A robot must be connected to a controlling computer. • The controlling computer sends instructions to the arm. • The controlling computer is the "brain" of the robot. • The controlling computer will have a control program uploaded onto it ie a set of instructions written in code.
Lesson 3: Automated Systems Sensor Controlling Computer Sensors & Feedback Robots need sensors to “sense” their surroundings. All physical properties can be measured with sensors such as light, heat, sound, pressure, acidity and humidity. Sensors collect information to be used by the controlling computer to decide what to do next. This process is known as feedback. Feedback Control Instruction • Feedback is essential for most automated systems, eg • the temperature of water needs to be fed back to be able to control a kettle • the microwaves have to be fed back to traffic light control systems. There are many different types of sensors, http://en.wikipedia.org/wiki/Sensor
Lesson 3: Automated Systems Control program instruction feedback Interface data Analogue signals vary in strength: eg temperature goes gradually up and down pressure gradually builds and fades. Sensor Digital signals are either 0 or 1: 00001110001100110 Interface An interface is needed between a sensor and the controlling computer. The interface is required because sensors are analogue yet the controlling computer understands digital data only. The interface converts the signals.
Lesson 3: Automated Systems 100oC 01100100 digital analogue 0 OFF digital analogue AD and DA Converters An AD converter is the interface that translatesanalogue data into digital data. AD Converter A DA converter is the interface that translatesdigital data into analogue data. DA Converter
Lesson 3: Automated Systems Questions Answer the following questions in your jotter. • Name the part of the automated system that control the action. • Why is a sensor needed? • List 3 types of sensors and explain what each could be used for. • Explain the term feedback. • Why is feedback necessary? • What happens as a result of feedback? • Explain why a interface is required. • Draw a diagram of where an interface will be positioned in system. • What is an AD converter? • What does a DA converter do and why?
Fun Things To Do Try programming the Picobot using it’s sensor. Try programming Lego Robot cars. Robots with a sense of touch http://news.nationalgeographic.com/news/2005/08/0817_050817_robotskin.html Beetles & Sensors http://news.nationalgeographic.com/news/2003/03/0314_030314_secretweapons3.html Robot Cars http://news.nationalgeographic.com/news/2005/10/1006_051006_robot_car_2.html Smart Cars http://news.nationalgeographic.com/news/2004/05/0521_040521_smartcars.html