Download
1 / 11
110 likes | 148 Views
Explore the technical and science missions of the Monterey Ocean Observing System, highlighting objectives, system concepts, deployments, and instrumentation specifics from the MBARI-CIMT workshop held in July 2004.

E N D
MBARI-CIMT Mooring EARTH Workshop July 7, 2004 Kent Headley, Software Engineer, MBARI
Technical Summary • Monterey Ocean Observing System (MOOS) • Context for MBARI-CIMT deployment • MOOS objectives and status • Objectives of MBARI-CIMT deployment • Science Mission • Technical Mission • Mooring Overview • Configuration • Information flow
“Monterey Ocean Observing System” • Development program of observatory technologies and systems integrated with multiple field deployments and science experiments • Aim is for the technologies and systems to be adopted by community observatory programs, e.g. Ocean Observatories Initiative (OOI) • System concepts • Buoy based observatories • Cabled observatories • MOOS Sub-Systems/Technologies • Software Infrastructure and Applications (SIAM) • Shore Side Data System (SSDS) • MOOS Mooring/MOOS Mooring Controller (MMC) • AUV’s/AUV docking • Vertical profiling MOOS Overview
MOOS Projects MOOS Mooring And MOOS Mooring Controller SIAM... Shore-Side Data System MBARI VerticalProfiler AUV Docking Dorado
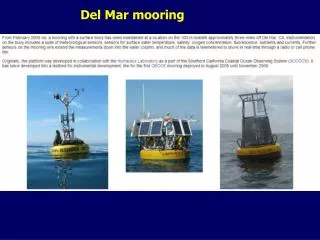
MOOS Mooring • Moored network of benthic, midwater, and surface nodes • Instruments can be accessed in near-realtime over satellite or radio link • Power (20-100 W) and data (10 Mbit/sec) to the seafloor • 4000 meter depth • 10 km Benthic runs • Support for AUV docking 10 km
MOOS Roadmap • 2 Deployments to test electro-optical-mechanical (EOM) cable technology • Dec 2002 • April 2004 • MBARI-CIMT Deployment • June 2004 • First science deployment of MOOS mooring
MBARI-CIMT Objectives • Science Mission • Technical Mission • Evaluate Key MOOS elements • Power System • MOOS Mooring Controller • Mooring upper water column configuration (no EOM Cable) • Software Infrastructure (SIAM) and Instrument Pucks • Shore Side Data System (SSDS) • Expose Operational Issues
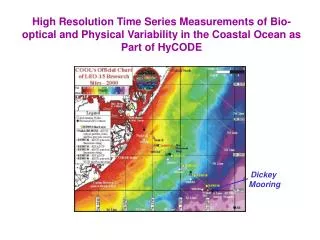
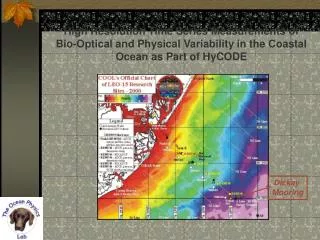
Mooring Location in Monterey Bay Source Unknown MBARI-CIMT Vital Statistics
Instrumentation Radar Reflector Anemometer Metsys Radiometer GPS Primary Radio Navigation Light Pager Reset 5m Cage ADCPRadiometer (2) SurfaceInstrument Pucks pCO2Orbcomm ModemGPS MMC Power System Mooring Cable 10 m: Radiometer (2) Inductive CTD 20 m: Inductive CTD 40 m: Inductive CTD 55 m: Inductive CTD Solar Panel Batteries Backscatter (not visible) Nitrate Fluorometer (not visible) 0m CTD Graphic by: Jon Erickson
System Operators Commands Data Telemetry External Data Information Flow Operations Deployed Data Metadata Internet Shore Side Data System Processed Data Science/Engineering Data Users External Data Source
References • MBARI Websites • http://www.mbari.org • http://ssdspub.mbari.org:8080/access/index.jsp • CIMT Website • http://cimt.ucsc.edu