Download
1 / 7
70 likes | 366 Views
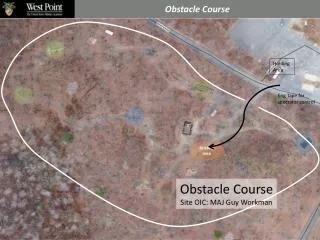
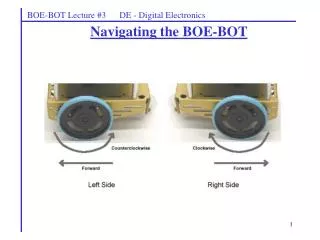
Boe Bot going through an Obstacle Course. By: Peyton Decker and Lance Dupont. Introduction. Objective: Program boe bot to go through the maze and up a ramp. Used the Infrared sensors and the accelerometer sensors . . Methods. Plug sensors into the robot using wires and resistors.

E N D
BoeBot going through an Obstacle Course By: Peyton Decker and Lance Dupont
Introduction Objective: Program boebot to go through the maze and up a ramp. Used the Infrared sensors and the accelerometer sensors.
Methods Plug sensors into the robot using wires and resistors. Infrared sensors aid robot to sense solid objects. Accelerometer helps robot go up the ramp.
Results • Boebot completed the maze and went up the ramp. • Was not Perfect. • Sensor errors.
Discussions • Sensor errors • Accelerometer did not activate after completing ramp. • Infrared sensors would make the robot turn the wrong way. • Could have had faster time if… • It did not keep colliding with ramp. • It turned the right way.
Summary Although the boebot completed its main objective with the aid of sensors, it was not pretty.