Result
Airborne Ant System for flight route optimization in a dynamic environment. Background of the thesis


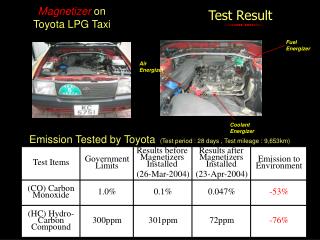
Result
E N D
Presentation Transcript
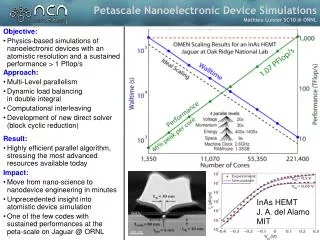
Airborne Ant System for flight route optimization in a dynamic environment Background of the thesis The current method for optimizing flight routes is based on the single-source shortest-path algorithm for graphs invented by Dijkstra. In the case of flight route optimization, the graph consists of waypoints which are interconnected by edges also known as segments. On its way from one waypoint to another, an aircraft has to consider many constraints (weather, fuel, over flight permissions, etc.). As most of these constraints change over time or depend on previously undertaken actions, the cost for traveling between two waypoints changes dynamically. As Dijkstra’s algorithm was not devised to deal with a dynamically changing environment, suboptimal solutions and other unforeseeable side-effects arise. Moreover, the design of Dijkstra’s algorithm restricts the implementation of additional functionality. In order to achieve a valid flight route, the optimized route has to be modified which finally leads to a suboptimal solution. A more flexible and extendable method for optimizing flight routes has to be instituted. New approach – Ant Colony Optimization Within the scope of this thesis the “Airborne Ant System” (AAS) is developed. The AAS is based on the Ant Colony Optimization framework which approaches discrete optimization problems according to the behavior of ants. Ants are able to find the shortest path to a food source by the help of pheromones which are spread by every individual. On a shorter path ants can move quicker back and forth, resulting in a higher pheromone concentration. Following ants will be guided by the pheromones. This principle is used by the AAS to guide a greedy search based on local quality attributes (local heuristic) towards an optimal solution. Artificial ants produce valid flight routes by traversing the airway graph. At the beginning, only the local heuristic is used to decide which segment to choose next. After numerous ants have constructed there solutions, the best one is allowed to mark its route by adding pheromones to the used segments (global heuristic). Following ants will be guided by good solutions but will also diverge in order to explore other possible routes. After numerous iterations the pheromones will converge towards the optimal solution. Figure 2: Minimum distance (red) and minimum time (green) track from Chicago to Frankfurt a.M. Result A prototype has been developed consisting of a global aeronautical navigation database, both optimization algorithms (Dijkstra and AAS) for calculating a minimum time flight route under consideration of live wind conditions and a visualization using Google Earth. Both algorithms have been compared and advantages and drawbacks of the AAS have been identified. The AAS was able to compete with Dijkstra in terms of quality. The major advantage of the AAS is its ability of covering all relevant factors for creating a flight route during the optimization process instead of ruining the solution found by Dijkstra afterwards. Due to the agent based iterative approach, the performance of the AAS is its most significant drawback. Nevertheless, the problem can be compensated by the possibility of parallelizing the AAS resulting in a speed-up of close to factor 2 using a dual core CPU. In the future, the Lufthansa Systems will consider this or similar techniques for approaching particular problems related to flight route optimization, which are insufficiently solved by Dijkstra. Figure 1: Airway graph from Los Angeles to New York. Author: Florian Aßmus Supervisor: Prof. Dr. Bettina Harriehausen (HDA) Co-Supervisor: Dr. Hossein Ghodosi (JCU)