Download
1 / 6
60 likes | 257 Views
Validation of ATMS Geolocation Using VIIRS Data. Chunming Wang. NGAS CrIMSS Team. Geolocation Accuracy of ATMS Measurement is Verified Against Geolocated VIIRS Data. High land-ocean contrast cloud free scenes in VIIRS IR data and ATMS window-channel data are isolated for the analysis

E N D
Validation of ATMS Geolocation Using VIIRS Data Chunming Wang NGAS CrIMSS Team
Geolocation Accuracy of ATMS Measurement is Verified Against Geolocated VIIRS Data • High land-ocean contrast cloud free scenes in VIIRS IR data and ATMS window-channel data are isolated for the analysis • 4 images with coastal features are selected from June 27, 2012 data • All images are at the center region of the scan where roll and pitch misalignments play most critical role • Each VIIRS pixel is mapped to a viewing angle in the ATMS Focal Plane Array frame • Accurate antenna pattern is used to generate a proxy ATMS brightness temperature using VIIRS IR band brightness temperature • Geolocation error estimates are consistent from all images used in this analysis • Geolocation error of about -0.2 pitch angle and 0.2 roll angle is detected ATMS Geolocation Error Relative to VIIRS is Around 3km
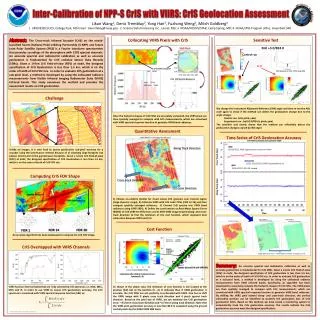
Geolocation Validation Analysis Employs 4 Different Metrics for Geolocation Errors ATMS SDR with Geolocation VIIRS M15 BT with Geolocation Generate Subset and Scaled VIIRS Images ATMS vs VIIRS Misalignment Compute ATMS FPA Frame in ECI For Each FOR Generate Subset ATMS Images Project VIIRS Pixels onto ATMS FPA Frame Edge Detection Evaluate ATMS Antenna Gain for VIIRS Pixels Optimization of Geolocation Compute Proxy ATMS Data Using VIIRS
Correction of Geolocation Error Substantially Improves Agreement Between ATMS and VIIRS • Threshold and scaled VIIRS images increase the sensitivity to geolocation error • Coastal contrast is the main source of brightness differences • Edge location error is the most sensitive measure of geolocation error • Improvement of agreements between ATMS and proxy VIIRS data is substantial Edge Error Before Edge Error After ΔBT Before ΔBT After
Estimations of Geolocation Error Using 4 Granules Produced Similar Results • Resolution of the estimation is 0.1 degree • Finer resolution analysis can be performed in the future • Cloud intrusion and the difference of IR and microwave emissivity can lead to uncertainties • Threshold and scaling of VIIRS brightness temperature reduce sensitivity to cloud and emissivity differences • Land mask can be used instead of VIIRS data • More absolute calibration of geolocation