Download
1 / 19
190 likes | 437 Views
Power, Torque and Robot arms. An intro. V E X Arms. Robert’s ARL robot in 2006. Outline. Rotating Arms Torque Power Multi-Jointed Arms Challenge Limit Switches. counter weight. motor. Rotating Arms.

E N D
Power, Torque and Robot arms An intro
VEX Arms Robert’s ARL robot in 2006
Outline • Rotating Arms • Torque • Power • Multi-Jointed Arms • Challenge • Limit Switches
counter weight motor Rotating Arms Torques are largeUse counterweights and gears to compensateAttach the gear to the armAttach the motor to the robot gear bolted to arm driven gear
Rotating Arm Carrier Robot posted on www.vexforum.com by VexLABS
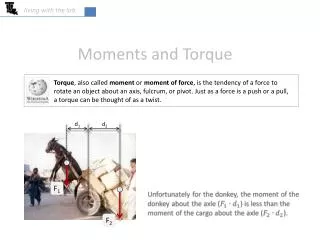
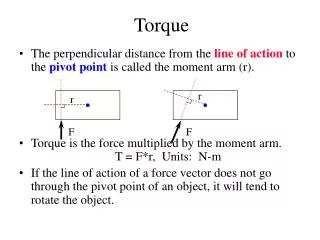
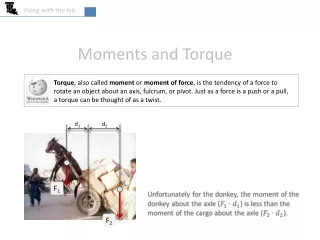
Torque (T) T = F┴d distance force perpendicular F d pivot point
d1 Which arm has more torque on it? 10 lbs Arm 2 Arm 1 10 lbs d2
D1 Which arm has more torque on it? T = F x D D1 > D2 - so - T1 > T2 10 lbs Arm 2 Arm 1 10 lbs D2
Two Equations for Power - or -
Which arm would require a more powerful motor? Arm 1 Arm 2 D D Force: 10 lbs Rotational Velocity: 200 RPM Gear Ratio: 4 to 1 Force: 10 lbs Rotational Velocity: 100 RPM Gear Ratio: 4 to 1
Which arm would require a more powerful motor? Force & distance are the same so torque is the same. Arm 2 needs a more powerful motor since its rotational velocity is greater. Arm 1 Arm 2 D D Force: 10 lbs Rotational Velocity: 200 RPM Gear Ratio: 4 to 1 Force: 10 lbs Rotational Velocity: 100 RPM Gear Ratio: 4 to 1
Multi-Jointed Arms Put multiple sections together to increase dexterity. www.vexrobotics.com Posted on www.vexforum.com by juniorVEXbot
Arms Challenge CHALLENGES LIKE THESE ARE GOOD FOR HIGH SCHOOL STUDENTS, because they are well-specified for existing robot kits. • In our case we work on open-ended projects, more similar to real life. • For instance we can assume nothing when designing a humanoid robot arms. • It is however good to be realistic about costs.
Advice • Balance arms with counterweights • not always possible • Use gears to get extra torque • not always necessary with balanced arms • Use sensors • limit switches to stop arms from over rotating • potentiometers or encoders to control location
Limit Switches Limit switches tell the robot controller when a device has gone far enough. Software can stop the servos and motors moving the device.
use limit switches & stop arms mechanically mechanical stop: something the arm hits to physically stop it
Optical Shaft Encoders • Detects 90 ticks per shaft rotation • Useful for measuring speeds *Old encoders (they only have one PWM cable) can’t tell direction of rotation *
Potentiometers(Variable Resistors) • Resistance depends on shaft rotation • Useful to accurately measure angles • Limited range of rotation
Sources • J.M. Gabrielse • Greg Needel - Designing Competitive Manipulators: The Mechanics & Strategy (www.robogreg.com)