Download

1 / 1
20 likes | 395 Views
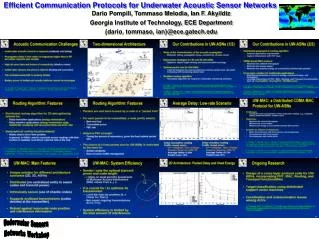
An architecture for ocean bottom UnderWater Acoustic Sensor Networks (UWASN). Dario Pompili, Tommaso Melodia { dario, tommaso } @ece.gatech.edu Broadband and Wireless Networking Laboratory, Georgia Institute of Technology Atlanta, GA 30332.

E N D
An architecture for ocean bottom UnderWater Acoustic Sensor Networks (UWASN) Dario Pompili, Tommaso Melodia {dario, tommaso} @ece.gatech.edu Broadband and Wireless Networking Laboratory, Georgia Institute of Technology Atlanta, GA 30332 1. APPLICATIONS FOR UNDERWATER ACOUSTIC SENSOR NETWORKS (UWASN) Ocean Sampling Networks: Networks of sensors and Acoustic Underwater Vehicles (AUV) can perform synoptic,cooperative adaptivesampling of theocean environment. Experiments such as the Monterey Bay field experimentin August 2003demonstrated the advantages of bringingtogether sophisticated new robotic vehicles with advanced oceanmodels to improve our ability to observe and predict thecharacteristics of the oceanic environment. PollutionMonitoringand other environmental monitoring (chemical,biological, etc.). Distributed Tactical Surveillance: AUVs and fixed underwater sensors can collaboratively monitorareas for surveillance,reconnaissance,targeting andintrusion detectionsystems. MineReconnaissance: The simultaneous operation of multiple AUVs withacoustic and optical sensors can be used to perform rapidenvironmentalassessment and detect mine like objects. 2. UNDERWATER ACOUSTIC (UW-A) CHANNEL 3. CHALLENGES IN UWASNs • Acoustic communications are mainly influenced by the following factors: • Path Loss • Attenuation. Provoked by absorption due to conversion of acoustic energy into heat, scattering, reverberation, refraction, and dispersion • Geometric Spreading. This refers to the spreading of sound energy as a result of the expansion of the wave-fronts. • Noise • Man made noise: • Machinery noise and shipping activity • Ambient Noise: • Hydrodynamics, seismic and biological phenomena. • Multi-path propagation • Generates Inter-Symbol Interference (ISI). • High delay and delay variance • The propagation speed in the UW-A channel is five orders of magnitude lower than in the radio channel. (0.67 s/km) • Doppler spread. Can be significant in UW-A and causes ISI. • Major challenges in the design of underwater acoustic networks are: • Battery power is limited and usually batteries can not be recharged; • The available bandwidth is severely limited [2]; • Channel characteristics, including long and variable propagation delays, multi-path and fading problems; • High bit error rates; • Underwater sensors are prone to failures due to fouling, corrosion, etc. 3. TRADITIONAL APPROACH FOR OCEAN-BOTTOM SENSOR NODES • The traditional approach for ocean-bottom or ocean column monitoring is to deploy underwater sensors that record data during the monitoring mission, and then recover the instruments [3]. This approach has the following disadvantages: • Real time monitoring is not possible. This is critical especially in surveillance or in environmental monitoring applications such as seismic monitoring. The recorded data cannot be accessed until the instruments are recovered, which may happen several months after the beginning of the monitoring mission. • No interaction is possible between onshore control systems and the monitoring instruments. This impedes any adaptive tuning of the instruments, nor is it possible to reconfigure the system after particular events occur. • If failures or misconfigurations occur, it may not be possible to detect them before the instruments are recovered. This can easily lead to the complete failure of a monitoring mission. • The amount of data that can be recorded during the monitoring mission by every sensor is limited by the capacity of the onboard storage devices (memories, hard disks, etc). 3. 2D-ARCHITECTURE FOR UWSAN • Sensor nodes are anchored to the bottom of the ocean with deep ocean anchors. • By means of wireless acoustic links, underwater sensor nodes are interconnected to one or more underwater sinks (uw-sinks). • Uw-sinks are equipped with two acoustic transceivers, horizontal and vertical transceiver. The first is used by the uw-sinks to communicate with the sensor nodes, while the second is used by the uw-sinks to relay data to a surface station. • Vertical transceivers must be long range transceivers for deep water applications. The surface station is equipped with multiple acoustic transceivers, one for each uw-sink deployed. • It is also endowed with a long range RF or satellite transmitter to communicate with the onshore sink(os-sink) or to a surface sink (s-sink). • Sensors can be connected to sinks by means of direct links or through multi-hop paths. In case of multi-hop paths, as in terrestrial sensor networks [4], data produced by a sensor is relayed by intermediate sensors until it reaches the uw-sink. 4. REFERENCES [1] M. Stojanovic, “Acoustic (underwater) communications,” in Encyclopedia of Telecommunications, J. G. Proakis, Ed. John Wiley and Sons, 2003. [2] J. G. Proakis, E. M. Sozer, J. A. Rice, and M. Stojanovic, “Shallow water acoustic networks,” IEEE Communications Magazine, pp. 114–119, Nov. 2001. [3] J. Proakis, J. Rice, E. Sozer, and M. Stojanovic, “Shallow water acoustic networks,” in Encyclopedia of Telecommunications, J. G. Proakis, Ed. John Wiley and Sons, 2003. [4] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “Wireless sensor networks: A survey,” Computer Networks (Elsevier) Journal, vol. 38, no. 4, pp. 393–422, Mar. 2002. The Third Annual Mediterranean Ad Hoc Networking Workshop - Med-Hoc-Net 2004 – Bodrum (Turkey) - 27-30 June