Download
1 / 16
160 likes | 262 Views
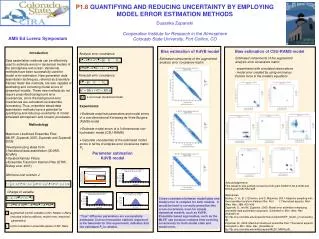
Explore the need for estimating model error from both data assimilation and general perspectives. Learn about the MLEF and State Augmentation methodology, along with experimental results using the KdVB and CSU-RAMS models. Discover how estimating model errors can improve dynamical models, predictability, and information content of observations.

E N D
Model error estimation employing ensemble data assimilation Dusanka Zupanski and Milija Zupanski CIRA/Colorado State University, Fort Collins, CO, U.S.A. EGU General Assembly 2005 NP5.01: Quantifying predictability 24-29 April 2005 Vienna, Austria Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
OUTLINE • Why do we need to estimate model error? - Data assimilation point of view - General point of view • Methodology - MLEF+State Augmentation • Experimental results - KdVB model (1-d) - CSU-RAMS model (3-d, non-hydrostatic) • Conclusions and future work Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Why do we need to estimate model error? Data assimilation point of view Goal of CLASSICAL data assimilation methods is to estimate (1) atmospheric state Goal of ENSEMBLE data assimilation methods is to estimate (1) atmospheric state (2) uncertainty of the estimated state Model error influences - adversely - both estimates ENSEMBLE approaches are more sensitive to model error Use this opportunity to further improve new methods. Be happy with the limited benefits of the new methods. or
Why do we need to estimate model error? General point of view Many additional applications in geophysics would benefit from model error estimation: • Improving current dynamical models • Developing new dynamical models • Quantifying predictability • Quantifying information content of observations • Obtaining new knowledge about geophysical processes This presentation is mostly focused on the data assimilation aspect, as a first step towards more general applications.
METHODOLOGY: MLEF approach Minimize cost function J Change of variable (preconditioning) - model state vector of dim Nstate >>Nens - control vector in ensemble space of dim Nens - information matrix of dim Nens Nens - columns of - columns of Z
METHODOLOGY: MLEF + State Augmentation - model state time evolution - serially correlated model error - model bias - vector of empirical parameters - AUGMENTED state time evolution Approach applicable to other EnKF methods.
RESULTS: Parameter estimation, KdVB model True parameter recovered. Improved innovation statistics.
RESULTS: Bias estimation, KdVB model NEGLECT BIAS BIAS ESTIMATION (vector size=101) BIAS ESTIMATION (vector size=10) NON-BIASED MODEL It is beneficial to reduce degrees of freedom of the model error.
RESULTS: Bias estimation, KdVB model Augmented analysis error covariance matrix is updated in each data assimilation cycle. It includes cross-covariance between the initial conditions (IC) error and model error (ME).
An experiment with a simple state dependent model error Estimate state dependent model error . Define model error components for u, v, T,…,q as: Estimate single parameter In real atmospheric applications, model errors are commonly more complex, but ARE often STATE DEPENDENT.
EXPERIMENTAL DESIGN • Non-hydrostatic atmospheric model (CSU-RAMS) - 3d model - simplified microphysics (level 2) • Hurricane Lili case • 25 1-h DA cycles: 13UTC 1 Oct 2002 – 14 UTC 2 Oct • 30x20x21 grid points, 15 km grid distance (in the Gulf of Mexico) - model domain 450km X 300km • Control variable: - u,v,w,theta,Exner, r_total (initial conditions, dim=54000) - h (dim=1) • Model simulated observations with random noise (7200 obs per DA cycle) • Nens=50 • Iterative minimization of J (1 iteration only)
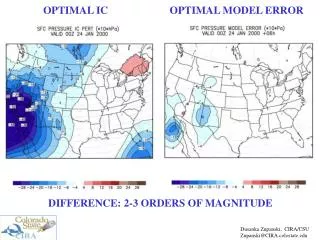
RESULTS: Parameter estimation, RAMS model U-WIND ANALYSIS ERRORS Both the initial conditions andthe parameter are adjusted. Control variable size is 54001. W-WIND ANALYSIS ERRORS Parameter estimation is almost as good as the perfect (correct) model data assimilation experiment.
RESULTS: Parameter estimation, RAMS model EXNER FUNCTION ANALYSIS ERRORS Both the initial conditions andthe parameter are adjusted. Control variable size is 54001. TOTAL WATER MIXING RATIO ANALYSIS ERRORS Neglecting model error reduces the benefits of data assimilation.
RESULTS: Parameter estimation, RAMS model Estimated parameter value is close to the true parameter value.
Neglect_err Param_estim Theta_il No_assim Correct_model True Differences of the order of 0.1K. Differences of the order of 1.0K-3.0K.
CONCLUSIONS • Ensemble based data assimilation methods, if coupled with state augmentation approach, can be effectively used to estimate empirical parameters. • Estimation of model errors can also be effective if number of degrees of freedom of the model error is reduced. • Neglecting model errors leads to degraded data assimilation results. • Capability to update augmented forecast error covariance is an advantage of ensemble based data assimilation approaches. Sensitivity of ensemble data assimilation approaches to model errors is an OPPORTUNITY for further improvements. This will be further explored in the future. Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu