Download

1 / 1
10 likes | 131 Views
This paper presents a framework for improving robotic task execution based on object types and environmental contexts. By utilizing Object Template Models (OTMs), users can select appropriate task models tailored to specific object categories. The Task Space Model (TSM) integrates OTMs with spatial information, allowing robots to effectively interact with fixed objects in their environment. This innovative approach aims to refine task selection and execution processes, promoting more intelligent and adaptable robotic systems in dynamic settings.

E N D
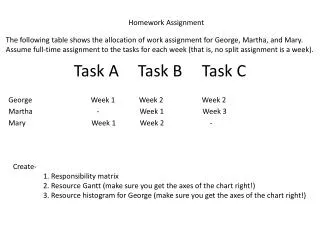
Task instruction by putting task information in work space Kazuyuki Nagata, Yujin Wakita, and Eiichi OnoNational Institute of Advanced Industrial Science and Technology (AIST)Intelligent Systems Research Institute1-1-1 Umezono, Tsukuba, 305-8568, Japan • User selects a task model according to an object type and situation in an environment. • Object Template Model (OTM) is the list of the task model which can be applied to an object category. • Task Space Model (TSM) describes a list of OTMs and spatial information on an object which fixed in an environment related to tasks of a robot.