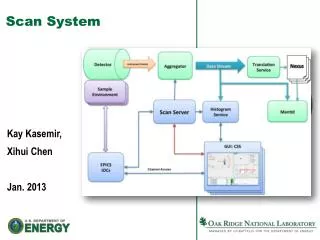
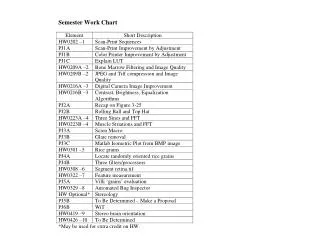
Scan
Scan. We want to build the equivalent of a laser scan using the segmentation line we have calculated and our knowledge of the correlation between pixel location on an image and distance away from the camera. Some Trig. Δ y sin( θ ). f / cos ( θ ). y o. θ. f. α. Δ y. θ. Δ y cos ( θ ).

Scan
E N D
Presentation Transcript
Scan • We want to build the equivalent of a laser scan using the segmentation line we have calculated and our knowledge of the correlation between pixel location on an image and distance away from the camera.
Some Trig Δy sin(θ) f / cos(θ) yo θ f α Δy θ Δy cos(θ) For a fixed horizon: h α D For non-fixed horizon:
Calibration • We used the fixed horizon equation and fixed the horizon at 50px then found the best fit for the calibration data
Calibration • Since we had calibrated our model to a 50px horizon, we created a method of making sure all our data from then on was also taken at a 50px horizon
Using the model • With this model and the segmentation, we are able to draw a distance map:
Creating maps • Using these distance maps, we can create an output in the form of a log file that looks exactly like the input log files for simultaneous localization and mapping (SLAM) algorithms.
More SLAM map building • An example of our goal (made in DP-SLAM)