Download
1 / 3
30 likes | 154 Views
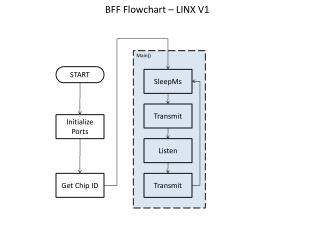
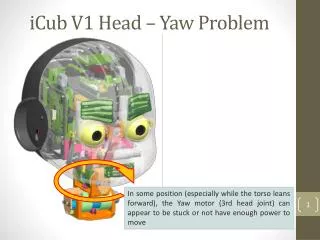
The iCub V1 robot may experience Yaw motor issues, especially when tilted forward. This can manifest as the Yaw motor (3rd head joint) appearing stuck or lacking the sufficient power for movement. This problem is typically caused by overly tight tolerances in the machining of the head chassis holes. To resolve this, carefully remove the screws indicated in the provided picture one by one, apply a drop of thread-locker to each, and re-position them without fully tightening. This adjustment can improve motor functionality.

E N D
iCub V1 Head – Yaw Problem In some position (especially while the torso leans forward), the Yaw motor (3rd head joint) can appear to be stuck or not have enough power to move
Problem Cause This can be due to a too tight tolerance in machining the holes holding the head chassis as shown in this picture.
Solution Remove one by one the screws circled in picture. Put a drop of thread-locker on the top of each screw and then re-position the screw without tightening