Download

1 / 165
1.76k likes | 2.39k Views
MOTOR INDUKSI TIGA PHASA. MOTOR INDUKSI TIGA PHASA. -. Motor induksi adalah suatu mesin listrik yang merubah energi listrik menjadi energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip antara medan stator dan medan rotor.

E N D
MOTOR INDUKSI TIGA PHASA -. Motor induksi adalah suatu mesin listrik yang merubah energi listrik menjadi energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip antara medan stator dan medan rotor. -. Motor induksi merupakan motor yang paling banyak kita jumpai dalam industri.
Stator -. Stator adalah bagian dari mesin yang tidak berputar dan terletak pada bagian luar. Dibuat dari besi bundar berlaminasi dan mempunyai alur – alur sebagai tempat meletakkan kumparan.
Rotor -. Rotor sangkar Adalah bagian dari mesin yang berputar bebas dan letaknya bagian dalam. Terbuat dari besi laminasi yang mempunayi slot dengan batang alumunium / tembaga yang dihubungkan singkat pada ujungnya.
Rotor kumparan ( wound rotor ) Kumparan dihubungkan bintang dibagian dalam dan ujung yang lain dihubungkan dengan slipring ke tahanan luar. Kumparan dapat dikembangkan menjadi pengaturan kecepatan putaran motor. Pada kerja normal slipring hubung singkat secara otomatis, sehingga rotor bekerja seperti rotor sangkar.
Keuntungan motor tiga phasa -.Konstruksi sangat kuat dan sederhana terutama bila motor dengan rotor sangkar. -. Harganya relatif murah dan kehandalannya tinggi. -. Effesiensi relatif tinggi pada keadaan normal, tidak ada sikat sehingga rugi gesekan kecil. -. Biaya pemeliharaan rendah karena pemeliharaan motor hampir tidak diperlukan.
KERUGIAN PENGGUNAAN MOTOR INDUKSI • Kecepatan tidak mudah dikontrol • Power faktor rendah pada beban ringan • Arus start biasanya 5 sampai 7 kali dari arus nominal
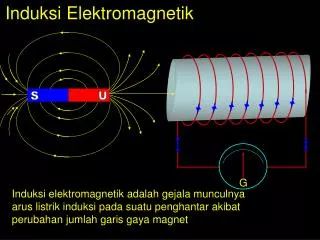
PRINSIP KERJA MOTOR (Gaya Lorentz) F = Gaya B = Kerapatan fluks I = Arus L = Konduktor Arus listrik (i) yang dialirkan di dalam suatu medan magnet dengan kerapatan Fluks (B) akan menghasilkan suatu gaya Sebesar:
Prinsip kerja 3 Phasa 1. Bila sumber tegangan tiga phasa dipasang pada kumpara stator, maka pada kumparan stator akan timbul medan putar dengan kecepatan ns = kecepatan sinkron f = frekuensi sumber p = jumlah kutup
2. Medan putar stator akan memotong konduktor yangterdapat pada sisi rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi ( ggl ) sebesar E = tegangan induksi ggl f = frekkuensi N = banyak lilitan Q = fluks
3. Karena kumparan rotor merupakan kumparan rangkaian tertutup, maka tegangan induksi akan menghasilkan arus ( I ). 4. Adanya arus dalam medan magnet akan menimbulkan gaya ( F ) pada rotor. 5. Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar untuk memikul torsi beban, maka rotor akan berputar searah dengan arah medan putar stator.
6. Untuk membangkitkan tegangan induksi E2s agar tetap ada, maka diperlukan adanya perbedaan relatif antara kecepatan medan putar stator ( ns )dengan kecepatan putar rotor ( nr ).7.Perbedaan antara kecepatan nr dengan ns disebut dengan slip ( S ) yang dinyatakan dengan persamaan:8.Jika ns = nr tegangan akan terinduksi dan arus tidak mengalir pada rotor, dengan demikian tidak ada torsi yang dapat dihasilkan. Torsi suatu motor akan timbul apabila ns > nr. 9.Dilihat dari cara kerjanya motor tiga phasa disebut juga dengan motor tak serempak atau asinkron.
Contoh soal • Motor enam kutub disuplai dari sumber 60 Hz fasa tiga. Kecepatan rotor pada beban penuh adalah 1140 rpm. Tentukan: a) kecepatan sinkron dari medan magnet b) slip per unit c) kecepatan rotor untuk sebuah hasil beban yang dikurangi di slip s = 0,02
Penyelesaian Diketahui : p = 6 f = 60 Hz nr = 1140 rpm • Kecepatan sinkron
TEGANGAN TERINDUKSI PADA ROTOR • Pada saat standstill (slip = 100%) • medan putar rotor maksimum • Fluks dalam stator sama dengan dalam rotor • tegangan yang dibangkitkan maksimum, tergantung pada belitan rotor • Tegangan yang diinduksikan ke rotor tergantung pada ratio belitan • Frekuensi rotor sama dengan frekuensi stator
Pada saat bergerak: • medan putar rotor maksimum • fluks dalam stator sama dengan dalam rotor • tegangan yang dibangkitkan berkurang sesuai dengan slip yang terjadi • Frekuensi rotor semakin berkurang sesuai dengan penurunan slip • Dapat disimpulkan bahwa: • Er = s x EBR • Er tegangan induksi rotor • EBR tegangan induksi rotor saat standstill • fR = s x fS • fR frekuensi rotor • fS frekuensi stator
Contoh Soal • A three-phase 60 Hz four-pole 220-V wound induction motor has a stator winding Delta connected and a rotor winding Y connected. The rotor has 40% as many turns as the stator. For a rotor speed of 1710 r/min, calculate: • The slip • The block rotor-induced voltage per phase EBR • The rotor-induced voltage per phase ER • The voltage between rotor terminals • The rotor frequency
Solution • The slip
The block rotor-induced voltage per phase EBR • The rotor-induced voltage per phase ER
The voltage between rotor terminals • The rotor frequency
RANGKAIAN ROTOR • Di rotor dalam tiap kondisi diperoleh kesimpulan: • Arus short circuit rotor dibatasi oleh impedansi rotor • Impedansi terdiri dari dua komponen yaitu: • Resistansi rotor RR • Reaktansi diri sXBR (XBR Reaktansi diri rotor pada stand-still) • Selama reaktansi diri merupakan fungsi dari frekuensi, reaktansi proportional terhadap slip
Sebagai hasil, arus rotor menjadi bila, maka,
Pembagian dengan s merubah titik referensi dari rotor ke rangkaian stator jika penyebut dan pembilang dibagi dengan s, maka: sehingga rangkaian ekuivalen rotor per fasa menjadi:
Untuk tujuan menyamakan dengan rangkaian resistansi rotor RR yang sebenarnya, maka RR/s dipisah dalam dua komponen: • sehingga rangkaian ekuivalen rotor menjadi sebagai berikut:
KOMPONEN DAYA PADA ROTOR • ROTOR POWER INPUT (RPI) • ROTOR COPPER LOSS (RCL) • ROTOR POWER DEVELOPED (RPD) • OUT-PUT POWER Ketiga komponen daya tersebut didapat dari persamaan: bila ruas kanan dan ruas kiri dari persamaan ini dikalikan dengan IR2, maka:
Dimana: • ROTOR POWER INPUT (RPI) • ROTOR COPPER LOSS (RCL) • ROTOR POWER DEVELOPED (RPD) RPI = RCL + RPD
DAYA OUT-PUT • Daya yang dibangkitkan di poros rotor dapat dinyatakan dengan persamaan: Pout = RPD - Protasional Protasional adalah daya hilang yang disebabkan oleh gaya gesekan (friksi) dan angin (kipas pendingin)
TORSI YANG DIBANGKITKAN • Torsi elektromekanik Te adalah torsi yang dibangkitkan di celah udara yang dapat dinyatakan dengan persamaan:
Torsi poros Td adalah torsi yang dibangkitkan di poros rotor yang dapat dinyatakan dengan persamaan: • Bila rugi Protasional diabaikan maka Td dapat dinyatakan dengan persamaan:
RANGKAIAN STATOR • Terdiri dari • Tahanan stator Rs • Reaktasi induktif Xs • Rangkaian magnetisasi (tidak boleh diabaikan seperti trafo karena rangkaian ini menyatakan celah udara) • Rangkaian stator per fasa dinyatakan pada gambar berikut:
Bila tegangan konstan • Rugi inti dianggap konstan mulai dari kondisi tanpa beban sampai beban penuh • Rc dapat dihilangkan dari diagram rangkaian tetapi: • rugi inti tetap ada dan diperhitungkan pada efisiensi • Arus magnetisasi pada motor sekitar 30% s/d 50% dari arus nominal • Reaktansi magnetisasi merupakan komponen penting pada rangkaian pengganti • Sehingga penyederhanaan diagram rangkaian stator menjadi seperti gambar berikut:
PENGGABUNGAN DIAGRAM RANGKAIAN ROTOR DAN STATOR • Sisi stator sebagaireferensi parameter rotor • Untukmenggabungrangkaian rotor denganrangkaian stator makadapatdigunakankonsep: “daya stator samadengandaya rotor” • Sehingga EBRharussamadengan ES • ES = a.EBR = E’BR • I’R = IR/a • R’R =a2.RR • X’BR =a2.XBR • Konstanta a merupakantransformasitegangan stator ke rotor
ANALISA ARUS (METODE LOOP) • Dari diagram rangkaian berikut dapat dibuat dua persamaan:
Loop I: • Loop II: • Dibuat dalam bentuk matrik didapat: