블루투스로봇 (Bluetooth Robot)-
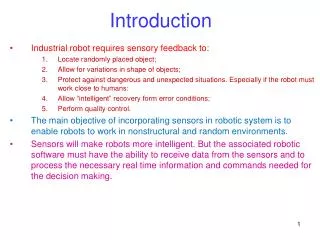
블루투스로봇 (Bluetooth Robot)-. - 블루투스 (Bluetooth) -. USB 케이블 연결 없이 컴퓨터에서 NXT 로 프로그램을 다운로드 NXT 와 같이 컴퓨터가 아닌 장치에서부터 프로그램을 전송 NXT 는 10m 까지 안정적인 통신을 지원한다 . 동시에 여러 개 혹은 한 그룹에 속하는 NXT 에 프로그램을 전송가능하며 , NXT 는 최대 3 대까지 하나의 그룹으로 묶을 수 있다. About Bluetooth. Bluetooth 파일을 전송하는 무선 전송 기술 중 하나 .

블루투스로봇 (Bluetooth Robot)-
E N D
Presentation Transcript
- 블루투스(Bluetooth) - • USB 케이블 연결 없이 컴퓨터에서 NXT로 프로그램을 다운로드 • NXT와 같이 컴퓨터가 아닌 장치에서부터 프로그램을 전송 • NXT는 10m까지 안정적인 통신을 지원한다. • 동시에 여러 개 혹은 한 그룹에 속하는 NXT에 프로그램을 전송가능하며, NXT는 최대 3대까지 하나의 그룹으로 묶을 수 있다.
About Bluetooth • Bluetooth • 파일을 전송하는 무선 전송 기술 중 하나. • 약 10m 거리 정도의 통신이 가능하다. • 장비 별로 식별 코드를 사용한다. • NXT와 Bluetooth • PC to NXT • NXT to NXT • 한 번에 한 개의 Bluetooth 장치와 통신이 가능하다 • 총 3 개의 장치까지 연결 유지가 가능하다.
Bluetooth Setting • Menu Icon • Bluetooth • My contacts • 이제 까지 연결되었던 블루투스 장치들의 정보가 기록된다. • Connections • 0, 1, 2, 3 무선 통신용 주변기기에 대한 포트 할당. • Visibility • 타 기기로부터의 탐색에 반응(Visible) 또는무반응(Invisible) 설정. • 탐색에 반응 시 LCD 상단 오른 쪽에 < 표시가 생긴다. • On/Off • 블루투스 기능 On / Off • Search • NXT 주변의 무선 통신용 기기를 찾는다.
Bluetooth Setting LCD 창에는 메뉴와 NXT의 여러 가지 정보가 표시된다 블루투스 기능은 활성화되어있지만 다른 블루투스 장치에서 검색이 불가능한 경우 블루투스 기능이 활성화되어있고 다른 블루투스 장치에서 검색이 가능한 경우 블루투스 기능이 활성화되어있고 다른 블루투스 장치와 연결이 설정되어있는 경우
Bluetooth Setting • 블루투스 활성화 • 블루투스 검색 • 왼쪽 상단 ‘< ’가없으면활성화
Bluetooth Setting • 블루투스 연결 • 통신 포트 설정 (0 ~ 4) • 자기 자신이 사용할 포트 1개와 다른 기기와 연결할 포트 3개 • 수신되는 메시지는 브로드캐스트 형태로 수신. • Passkey 설정(입력)(PIN-CODE 기본값: 1234) • 연결 대상 NXT와 패스키가 같아야 연결이 성립된다. • 연결 확인 ‘<>’
RobotC 블루투스로 연결 설정(RobotC 와 NXT 연결하기) • RobotC 프로그램을 실행한다. • [Robot]-[NXT Brick]-[Link Setup]을 실행한다. • 창이 뜨면 NXT Bricks Reachable via Bluetooth Wireless 창에서 Include Bluetooth in Brick Search 왼쪽의 체크 박스에 체크한다. • 블루투스를 통해 연결할 수 있는 NXT를 검색한다. • 검색이 완료되면 NXT Bricks Reachable via Bluetooth Wireless 창에 연결 가능한 NXT의 이름과 하드웨어 주소가 나온다. • 원하는 NXT를 선택한 후 오른쪽에 Select 단추를 누르면 NXT와 RobotC와의 연결이 완료된다. 블루투스 드라이버가 컴퓨터에 먼저 설치되어있어야 함
NXT Remote Screen • RobotC 프로그램을 Compile& Download 한다. • RobotC 프로그램을 Start 한다 • [Robot]-[Debugger Windows]-[NXT Remote Screen] 선택 • 원격으로 NXT 버튼 컨트롤 가능 • 마우스를 이용하여 NXT 버튼 조작 가능 • 키보드 화살표키로도 조작 가능
NXT Moving Using KeyBoard task main() { nNxtExitClicks=10000; while (1) { if (nNxtButtonPressed == kLeftButton) { motor[motorA] = 0; motor[motorC] = 60; } else if (nNxtButtonPressed == kRightButton) { motor[motorA] = 60; motor[motorC] = 0; } else if (nNxtButtonPressed == kEnterButton) { motor[motorA] = 60; motor[motorC] = 60; } else if (nNxtButtonPressed == kExitButton) { motor[motorA] = -60; motor[motorC] = -60; } else { motor[motorA] = 0; motor[motorC] = 0; } } }
메시지 전송하고 수신하기 • 마스터 NXT에서 메시지를 전송하고, 슬레이브 NXT에서는 받은 메시지를 출력
메시지 전송하고 수신하기 • Master • sendMessageWithParm(변수); • temp 변수의 값을 슬레이브로 전송한다. • 변수1, 변수2, 변수3 까지 3개까지 사용 가능 • Slave • bQueuedMsgAvailable() • 큐에 들어있는 메시지를 조사하는 함수 • ClearMessage() • - 큐에 들어있는 메시지를 지우는 함수
NXT 리모컨 만들기 • 리모컨에서 전송되는 데이터를 슬레이브 로봇에서 받아서 그 값에 따라 움직이는 간단한 무선 조종 자동차 로봇
NXT 리모컨 만들기 • sendMessageWithParm() 함수는 한번에 3개까지의 데이터를 전송할 수 있다. 그렇다면, 3개 이상 넘어가는 정보는 어떻게 보낼 것인가? • 데이터가 1개여도 충분 • 보내는쪽 : 숫자를 합쳐서 전송 (예: 두수를 합쳐서 전송) • 받는 쪽 : 받은 수를 적당히 분해하여 처리 (예: 자리수에 따라 분해) Master
응용: 무선자동차 핸들 • 서보 모터의 엔코더 값을 활용하여 자동차 핸들을 구현
Master Slave
- Q & A - ???