Download
1 / 23
480 likes | 1.33k Views
Resultant of concurrent coplanar forces. Mr. Alok Damare Prof. Civil Engg . Dept. INTRODUCTION . Engineering mechanics is that branch of science which deals with deals with the system of forces, effect produced by these forces on rigid object.

E N D
Resultant of concurrent coplanar forces Mr. AlokDamare Prof. Civil Engg. Dept.
INTRODUCTION • Engineering mechanics is that branch of science which deals with deals with the system of forces, effect produced by these forces on rigid object. • Mechanics can be divided into two main branches – Statics and Dynamics.
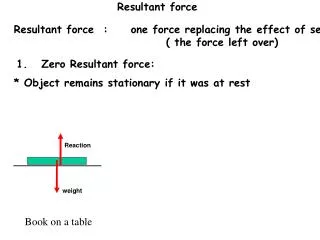
Statics Statics is that branch of Engineering mechanics, which deals with the study of system of forces and effect produced by these forces on rigid bodies, which are at rest and remains at rest.
Dynamics Dynamics is that branch of Engineering mechanics, which deals with the study of system of forces and motion produced by these forces on rigid bodies. • There are two sub division of Dynamics Kinetics Kinematics Kinetics deals with the problems which requires determination of the effect of forces on the motion of the body. Kinematics is the study of motion of a body without considering the effect of its mass and forces acting on it.
Body A portion of matter which occupies a finite space. A body is made of atoms and molecules arranged in complex but continues manner. Deformable Body Rigid Body A body which change its size and shape when subjected to external load • A body which dose not change its size and shape when subjected to external load . • In some case the deformation is negligible and assume that it is rigid. Actually solid bodies are never rigid, they deform under the action of applied forces. In those cases where this deformations negligible compared to the size of the body, the body may be considered to be rigid.
PARTICLE Portion of matter having smallest size or its dimensions. A body whose dimensions are negligible as compared to distance travelled by it during motion may also be treated as particle For example, while studying the motion of sun and earth, they are considered as particles since their dimensions are small when compared with the distance between them.
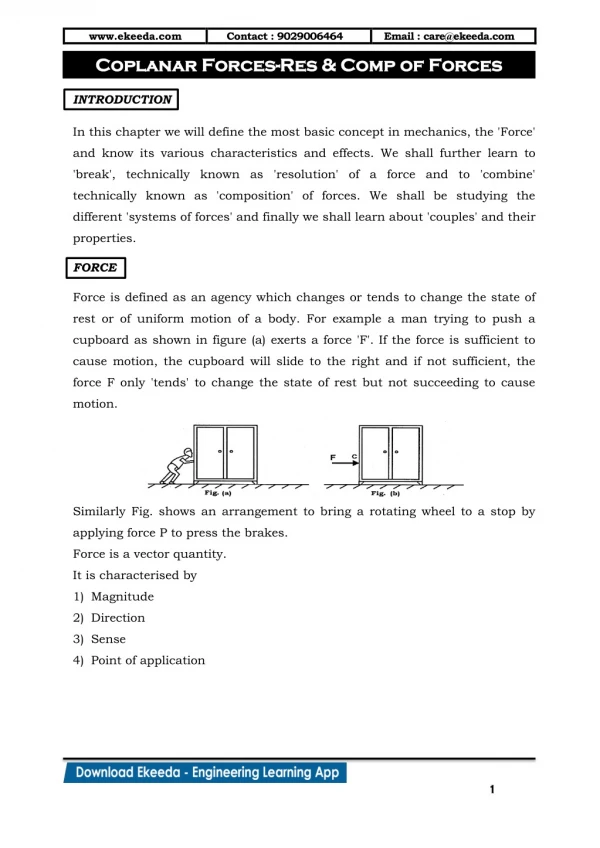
Force It is that agent which causes or tends to cause, changes or tends to change the state of rest or of motion of a mass. A force is fully defined only when the following four characteristics are known: Magnitude Direction Point of application Sense.
characteristics of the force 10 kN are : Magnitude = 10 kN Direction = at an inclination of 60° to the x-axis Point of application = at point A shown Sense = towards point A 10kN 60° A
Scalars and Vectors A quantity is said to be a ‘scalar 'if it is completely defined by its magnitude alone. Example: Length, Area, and Time. A quantity is said to be a ‘vector 'if it is completely defined only when its magnitude and direction are specified . Example : Force, Velocity, and Acceleration.
Principle of Transmissibility It is stated as follows : ‘The external effect of a force on a rigid body is the same for all points of application along its line of action’. For example, consider the above figure. The motion of the block will be the same if a force of magnitude P is applied as a push at A or as a pull at B. The same is true when the force is applied at a point O. P P A B P P O
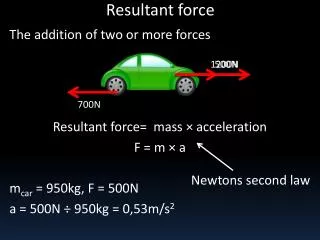
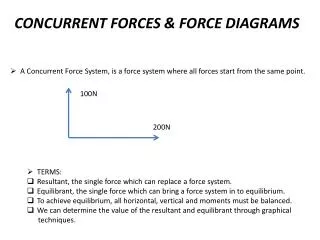
RESULTANT OF COPLANAR FORCES It is defined as that single force which can replace a set of forces, in a force system, and cause the same external effect.
Resultant of two forces acting at a point Parallelogram law of forces point ‘If two forces acting at a point are represented in magnitude and direction by the two adjacent sides of a parallelogram, then the resultant of these two forces is represented in magnitude and direction by the diagonal of the parallelogram passing through the same point.
Triangle law of forces ‘If two forces acting at a point can be represented both in magnitude and direction, by the two sides of a triangle taken in tip to tail order, the third side of the triangle represents both in magnitude and direction the resultant force F, the sense of the same is defined by its tail at the tail of the first force and its tip at the tip of the second force’.
Component of a force • Component of a force, in simple terms, is the effect of a force in a certain direction. A force can be split into infinite number of components along infinite directions. • Usually, a force is split into two mutually perpendicular components, one along the x-direction and the other along y-direction (generally horizontal and vertical, respectively). • Such components that are mutually perpendicular are called Rectangular Components’. • The process of obtaining the components of a force is called ‘Resolution of a force’.
Component of a force • Consider a force F making an angle θ with x-axis. • Then the resolved part of the force F along x-axis is given by H = F cosθ • The resolved part of the force F along y axis is given by V = F sinθ
Oblique component of a force • Let F1and F2be the oblique components of a force F. The components F1and F2can be found using the ‘triangle law of forces’.βαFF1F2The resolved part of the force F along OM and ON can obtained by using the equation of a triangle. βαFF1F2MON • F1/ Sin β= F2 / Sin α= F / Sin(180 -α-β)
A force that can replace a set of forces, in a force system,and cause the same ‘external effect’ is called the Resultant
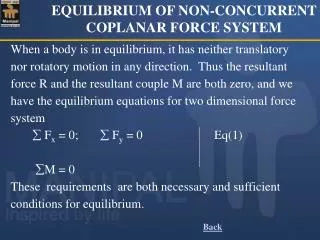
Coplanar Non-concurrent Force System Thisis the force system in which lines of action of individual forces lie in the same plane but act at different points of applications.
Parallel Force System –Lines of action of individual forces are parallel to each other. • Non-Parallel Force System –Lines of action of the forces are not parallel to each other.
MOMENT OF A FORCE Moment is the tendency of a force to make a rigid body to rotate about an axis. • The applied force can also tend to rotate the body about an axis in addition to motion. This rotational tendency is known as moment. • This is a vector quantity having both magnitude and direction.
MOMENT OF A FORCE Moment Axis: This is the axis about which rotational tendency is determined. It is perpendicular to the plane comprising moment arm and line of action of the force (axis 0-0in the figure). • Moment Center: This is the position of axis on co-planar system. (A). • Moment Arm: Perpendicular distance from the line of action of the force to moment center. Distance AB = d.
Sense of moment: • The sense is obtained by ‘Right Hand Thumb rule. ‘If the fingers of the right hand are curled in the direction of rotational tendency of the body, the extended thumb represents the sense of moment vector. • For the purpose of additions, the moment direction may be considered by using a suitable sign convention such as + ve for counterclockwise and – ve for clockwise rotations or vice-versa.