Download
1 / 1
10 likes | 179 Views
Herdawatie Abdul Kadir & Mohd Rizal Arshad Underwater Robotics Research Group (URRG) School of Electrical and Electronic Engineering, Engineering Campus USM Nibong Tebal , Pulau Pinang, Malaysia . Lateral Longitudinal Optimal Control for Unmanned Blimp. INTRODUCTION

E N D
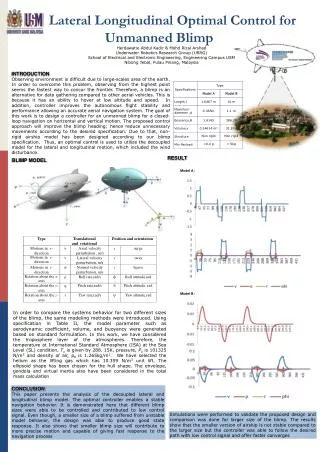
Herdawatie Abdul Kadir & Mohd Rizal Arshad Underwater Robotics Research Group (URRG) School of Electrical and Electronic Engineering, Engineering Campus USM NibongTebal, Pulau Pinang, Malaysia Lateral Longitudinal Optimal Control for Unmanned Blimp INTRODUCTION Observing environment is difficult due to large-scales area of the earth. In order to overcome this problem, observing from the highest point seems the fastest way to concur the frontier. Therefore, a blimp is an alternative for data gathering compared to other aerial vehicles. This is because it has an ability to hover at low altitude and speed. In addition, controller improves the autonomous flight stability and performance allowing an accurate aerial navigation system. The goal of this work is to design a controller for an unmanned blimp for a closed-loop navigation on horizontal and vertical motion. The proposed control approach will improve the blimp heading; hence reduce unnecessary movements according to the desired specification. Due to that, non-rigid airship model has been designed according to our blimp specification. Thus, an optimal control is used to utilize the decoupled model for the lateral and longitudinal motion, which included the wind disturbance. RESULT BLIMP MODEL Model A : Model B: In order to compare the systems behavior for two different sizes of the blimp, the same modeling methods were introduced. Using specification in Table II, the model parameter such as aerodynamic coefficient, volume, and buoyancy were generated based on standard formulation. In this work, we have considered the troposphere layer of the atmospheres. Therefore, the temperature at International Standard Atmosphere (ISA) at the Sea Level (SL) condition, To is given by 288. 15K, pressure, Po is 101325 N/m3 and density of air, ρ0 is 1.265kg/m3. We have selected the helium as the lifting gas which has 10.359 N/m3 unit lift. The ellipsoid shape has been chosen for the hull shape. The envelope, gondola and virtual inertia also have been considered in the total mass calculation CONCLUSION This paper presents the analysis of the decoupled lateral and longitudinal blimp model. The optimal controller enables a stable navigation behavior. It is demonstrated here that different blimp sizes were able to be controlled and contributed to low control signal. Even though, a smaller size of a blimp suffered from unstable model behavior, the design was able to produce good state response. It also shows that smaller blimp size will contribute to more precise motion and capable of giving fast response to the navigation process Simulations were performed to validate the proposed design and comparison was done for larger size of the blimp. The results show that the smaller version of airship is not stable compared to the larger size but the controller was able to follow the desired path with low control signal and offer faster converges