Download
1 / 46
460 likes | 616 Views
Sunflower 완료 세미나. Celestial Global Positioning System. 2008 . 07 . 03. 전 지구 측위기 개요. 1. 동기. 비젼부 구현 사항. 2. 5. 알고리즘부 구현 사항 . 3. 하드웨어부 구현 사항 . 항목별 개선 완료 내역. Demo 및 Q&A. 4. 6. 7. Contents. 전 지구 측위기 개요. 개 요. 목표 태양의 위치를 확인하여 현재 관찰자의 위치를 알려주는 GPS 와 같은 측위시스템 개발

E N D
Sunflower 완료 세미나 Celestial Global Positioning System 2008 . 07 . 03
전 지구 측위기 개요 1 동기 비젼부 구현 사항 2 5 알고리즘부 구현 사항 3 하드웨어부 구현 사항 항목별 개선 완료 내역 Demo 및 Q&A 4 6 7 Contents
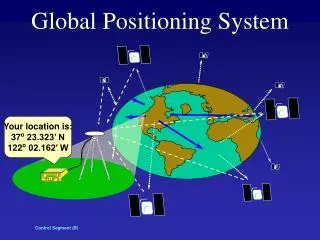
개 요 • 목표태양의 위치를 확인하여 현재 관찰자의 위치를 알려주는 GPS와 같은 측위시스템 개발 • 이점전시와 위성마비 상황에서도 작동가능대규모 기반시설 불필요
동 기 그런데 GPS가.. 사용 할 수 없게 된다. 흑점폭발 공격위성
[기구부 향상] 부품 지자기 센서의 Noise제거 자기장 차단제로 완전 케이스를 제작하여 자기장을 차폐한다. 자기장 차단제
[기구부 향상] 부품 지자기 센서의 Noise제거 자기장 차단제로 완전 케이스를 제작하여 자기장을 차폐한다.
[기구부 향상] 부품 지자기 센서의 Noise제거
[기구부 향상] 기구부 참고 PCB 결합 위치 기어와의 정확한 결합을 위해 정확한 위치로 설계 및 제작
[기구부 향상] 기구부 참고 작동: 현재 테스트보드의 구성상 문제로 기어가 맞물리지 않아 수평축 이동에 문제 발생
[기구부 향상] 기구부 참고 작동: 현재 테스트보드의 구성상 문제로 기어가 맞물리지 않아 수평축 이동에 문제 발생
Astro • 적경, 적위를 고도, 방위각으로 변환하는 공식의 방정식을 풀어 위도와 경도를 계산 • Sin(고도) = sin(위도)sin(적위) + cos(적위)cos(위도) cos(LHA) • Tan(방위각) = -cos(적위)cos(위도)sin(LHA) / sin(적위) – sin(위도)sin(고도) • 고도, 방위각 : 측정 • 적위: L(Mean Longitude of the Sun) , E ( obliquity of the ecliptic ) 계산 • L , E : T ( number of Julian centuries since Jan 1, 2000, 12 UT ) 계산 • LHA (Local Hour Angle) : GAST, 적경, 경도 계산. • 적경: L, E 계산 • GAST (Greenwich Apparent Sidereal Time) : T 를 이용하여 계산
경도 연산 알고리즘 <적경/적위를 고도/방위각으로 변환하는 공식> sin(고도) = sin(적위) sin(위도) + cos(적위) cos(위도) cos(지방항성시-적경) tan(방위각) = [-cos(적위) cos(위도) sin(지방항성시-적경)] / [sin(적위) - sin(위도) sin(고도)] LST = GST – | ( 그리니치 경도 – 관측자 경도 ) | / 15 따라서 관측자경도 = ( LST – GST ) * 15 시간각: 360도를 24시로 표시하는 각 항성시: 특정 별이 같은 위치로 오는 시간을 정확히 24시간으로 하는 시간 GST(그리니치 지방 항성시): 그리니치 자오선에서 측정된 항성시 LST(지방항성시): 타지방일 경우 그리니치를 기준으로 연산한 항성시
[Astro] 오차요인 분석 • 천문상수들의 특성에 의한 오차 ex) UT to GST : 12시 기준시간을 정하기위해서UT값의 0.5이하 소수를 버림 • LHA 근사치 정확도 연산 • 10e-6 단위로 증가시키면서 근사치 해를 구한다.
시스템 구성도 시스템초기화 DSP TMS320F2812 Magnetic Compass Gyro Sensor Tilt Sensor Motor 1 Motor 2 Encoder 1 Encoder 2 Bluetooth 태양 추적
개발환경 • WindowsXP SP2 • TMS320F2812 • CCS 3.3 C2000 • TDS510USB Plus Emulator
초기화 부품 방위각: 지자기 센서 이용 고도: 기울기센서
시스템 동작 순서 STEP 1 시스템초기화 STEP 2 Scanning STEP 3 PC에서 제어 센서를 통해 방위각과 고도 0인 지점으로 이동 태양을 찾을 때 까지 방위각과 고도 변경 태양의 중심을 찾을 때 까지 방위각과 고도 변경
[제어향상] Sensor Fusion 기울기 센서의 횡가속도의 영향을 줄임 + Gyro Tilt + Angle LPF Tilt 적분 Gyro HPF
[제어향상]Sensor Fusion Phase Delay 거의 없음. 횡 가속도의 영향을 줄임
고도 & 방위각 제어 – Tilt, Gyro Tilt 지자기 센서
고도 & 방위각 제어 - Encoder 초기화할 때는 Sensor 를 기준으로 위치제어 초기화가 끝난 뒤에는 Encoder를 기준으로 위치 제어
고도 측정 및 통신 • RS-232통신을 이용하여 PC와 통신 화면의 중심과 태양의 중심과 상대 좌표 DSP PC 고도와 방위각
지자기 센서의 오작동 • 수평 – 수평계를 통한 수평 확인 • Motor – 퍼멀로이를 통한 자기장 차단 • 베어링, 아크릴 – 센서의 위치조정 • 강자계에 의한 오작동
비젼부 Library : OpenCV Filter : ND8 * 4개 태양의 중심부는 주변부에 비해 가장 밝으며 밝기는 거리제곱에 반비례하는 성질을 이용.
Image Processing (해 찾기) 단계 = 8 • 이미지를 명도 단계로 구분 • 명도 256 단계 -> 명도 8, 16, 32, 64 단계 • 유사한 단계에 있는 명도 구간이 하나의 영역으로 나타남 • < 명도 8단계 (좌), 16 단계(우) 로 구분한 이미지> 이미지를 명도 단계로 구분 성공 실패 No Yes 닫힘 연산 단계 x 2 최소오차 < 허용범위 가장 큰 명도 값으로 이진화 라벨링하여 원 선택 단계 <= 64 ? Yes No 경계 추출 최소 오차 갱신, 외접원 생성 오차 산정
Image Processing (해 찾기) 단계 = 8 • 2.닫힘 연산 • 명도 단계에 따라 구분한 이미지에서 구분된 영역 내의 노이즈를 제거 • 팽창 -> 침식 • 3.가장 큰 명도로 이진화 • 웹캠의 자동 노출 • 태양의 중심부근의 명도가 가장 높음 • 4. 라벨링 하여 원 선택 • 가장 큰 면적의 원 선택 : 노이즈 또는 태양의 일부 배제 이미지를 명도 단계로 구분 성공 실패 No Yes 닫힘 연산 단계 x 2 최소오차 < 허용범위 가장 큰 명도 값으로 이진화 라벨링하여 원 선택 단계 <= 64 ? Yes No 경계 추출 최소 오차 갱신, 외접원 생성 오차 산정
Image Processing (해 찾기) 단계 = 8 • 5. 경계 추출 및 외접원 생성 • 빛은 구의 형태로 사방으로 퍼짐 • 빛의 밝기는 거리의 제곱에 반비례 • 동일한 밝기를 갖는 구간은 태양의 중심으로부터 같은 거리에 있다고 추정. • 해당 경계가 모두 포함되는 외접원 생성 • 6.오차 산정 • 선택된 영역의 면적 / 외접원의 면적 • 노이즈가 기타 장애 요소가 포함될 경우 낮은 수치. 이미지를 명도 단계로 구분 성공 실패 No Yes 닫힘 연산 단계 x 2 최소오차 < 허용범위 가장 큰 명도 값으로 이진화 라벨링하여 원 선택 단계 <= 64 ? Yes No 경계 추출 최소 오차 갱신, 외접원 생성 오차 산정
Image Processing (해 찾기) 단계 = 8 7. 16, 32, 64 단계에 동일하게 적용 - 경우에 따라 좀 더 세분화하여 수행 가능 8. 최소 오차 값이 허용 범위 내에 있을 경우 해당 외접원의 중심을 태양의 중심으로 선정 이미지를 명도 단계로 구분 성공 실패 No Yes 닫힘 연산 단계 x 2 최소오차 < 허용범위 가장 큰 명도 값으로 이진화 라벨링하여 원 선택 단계 <= 64 ? Yes No 경계 추출 최소 오차 갱신, 외접원 생성 오차 산정
Software 구조. Global Positioning Dlg <webcam모듈> VideoWnd <Serial 통신 모듈> <천문 알고리즘 모듈> Astro CommThread <영상처리 모듈> Image Process time util Queue
소프트웨어 구동 (Manual Search) Manual Search Thread Start No 카메라로부터 이미지 획득 이미지로부터 태양 추출 No 오차범위 < 허용범위 Yse 중심과의 거리 측정 No 거리 < 허용거리 HW 이동 Yse HW로부터 고도, 방위각 측정 위도, 경도 계산
소프트웨어 구동( Auto Search ) Auto Search Thread Start Auto Search 중?? No Yse 카메라로부터 이미지 획득 이미지로부터 태양 추출 No 오차범위 < 허용범위 Yse Auto Search 종료 명령 Manual Mode 실행 Auto Search 실패
DEMO DEMO
구현 항목 [설계] 기구부설계 마찰력 제거 기어설계로 프레임 제어 – 밀림현상 방지 자기장 간섭차단 1. 위치 2. 접지3. 차단제 4. 재료변경 정확한 축간 결합 • [제어] • 회로설계 • 모터제어 • 수평제어 • 기울기 센서 제어 • 자이로 센서 제어 • 자북인식 • 방위각 측정 • 고도측정
구현 항목 [알고리즘] -적경 -적위 -LST -GST -황경 -줄리어스역 -위도 산출 알고리즘 -경도 산출 알고리즘 [비젼] -태양의 인식 알고리즘 -태양 중심 추출 알고리즘 중심과 이각 측정 구현 노이즈개선 적용 디바이스간 통신 UI 구현
전지구측위 시스템 Q & A