Download
1 / 1
10 likes | 183 Views
Simulation of Ground Clutter Influence on Polarimetric Rainfall Rate Katja Friedrich*, Urs Germann*, Gianmario Galli*, Pierre Tabary + , Jacques Parent du Chatelet + * MeteoSwiss, Locarno, Switzerland; + Météo France, Paris, France. MOTIVATION.

E N D
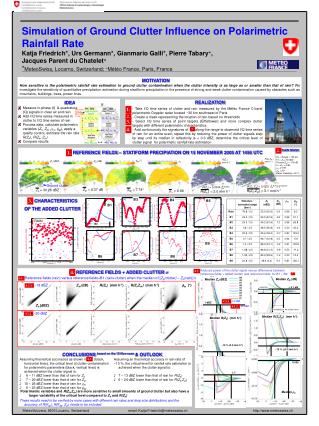
Simulation of Ground Clutter Influence on Polarimetric Rainfall Rate Katja Friedrich*, Urs Germann*, Gianmario Galli*, Pierre Tabary+, Jacques Parent du Chatelet+ *MeteoSwiss, Locarno, Switzerland; +Météo France, Paris, France MOTIVATION How sensitive is the polarimetric rainfall rate estimation to ground clutter contamination when the clutter intensity is as large as or smaller than that of rain? We investigate the sensitivity of quantitative precipitation estimation during stratiform precipitation in the presence of strong and weak clutter contamination caused by obstacles such as mountains, buildings, trees, power lines. REALIZATION IDEA Measure in-phase (I) & quadrature (Q) signals in clear air and rain Add I/Q time series measured in clutter to I/Q time series of rain Process data, calculate polarimetric variables (Zh, Zdr,hv, dp), apply a quality control, estimate the rain rate R(Zh),R(Zh, Zdr) Compare results • - Take I/Q time series of clutter and rain measured by the Météo France C-band polarimetric Doppler radar located ~30 km southwest of Paris • - Create a mask representing the location of rain based on thresholds • - Select I/Q time series of point targets (Eiffeltower) and more complex clutter targets with different polarimetric characteristics • - Add continuously the signatures of along the range to observed I/Q time series of rain for an entire scan; repeat this by reducing the power of clutter signals step by step until its median in reflectivity is < 0.3 dBZ; determine the critical level of clutter signal for polarimetic rainfall rate estimation 1. 2. 3. 4. 3. II) RAIN MASK 25 < Range < 100 km 15 < Zh < 50 dBZ Texture(Zdr) < 1.50 dB 0 < Zdr < 4 dB hv > 0.97 dp < 20° Beam shielding < 50 % 2. I) REFERENCE FIELDS – STATIFORM PRECIPIATION ON 15 NOVEMBER 2005 AT 1456 UTC 1. R(Zh,Zdr ) (mm h-1) R(Zh ) (mm h-1) dp (°) Zh (dBZ) Zdr (dB) hv Rain Ground clutter R(Zh, Zdr) = 0.0221 Zh0.76 10-0.33Zdr R(Zh) = 0.0034 Zh0.6024 Zdr = 0.37 dB dp = 7.74° Zh = 30.26 dBZ hv = 0.98 R(Zh,Zdr) = 3.1 mm h-1 R(Zh ) = 2.0 mm h-1 III) CHARACTERISTICS OF THE ADDED CLUTTER B3 3. B4 B5 B1 RAIN B2 B9 B7 B6 B8 35.0 36.0 37.0 38.0 Azimuth (°) IV) REFERENCE FIELDS + ADDED CLUTTER = 2.) Reduced power of the clutter signal versus differences between (reference fields + added clutter) and reference fields for B1 – B9: 4. 4.2. 3. 1.) Reference fields (rain) versus reference fields+B1 (rain+clutter) when the median of [Zh(clutter) – Zh(rain)] is: 4.1. Median Zdr(dB) Median Zh(dBZ) a) -13 dBZ -13 dBZ Zdr(dB) R(Zh)(mm h-1) R(ZhZdr)(mm h-1) dp(°) 4.1.1. accuracy 0.1 dB Zdr(rain+clutter) (dB) R(Zh)(rain+clutter) (mm h-1) Zdr(rain+clutter) – Zdr(rain)- (dB) Zh(rain+clutter) – Zh(rain) (dBZ) dp (rain+clutter) (°) Zh(rain+clutter) (dBZ) R(Zh,Zdr)(rain+clutter) (mm h-1) 1a) -13 dBZ 4.1.1. 1 dBZ Zh(dBZ) 4.1.2. 1b) -30 dBZ Variability of the critical level -30 dBZ 4.1.2. Median R(ZhZdr)(mm h-1) Median R(Zh)(mm h-1) b) -30 dBZ R(Zh)(rain+clutter) (mm h-1) dp (rain+clutter) (°) R(Zh,Zdr)(rain+clutter) (mm h-1) Zh(rain+clutter) (dBZ) Zdr(rain+clutter) (dB) R(Zh)(rain+clutter) – R(Zh) (rain) (mm h-1) R(Zh,Zdr)(rain+clutter) – R(Zh,Zdr) (rain) (mm h-1) R(Zh,Zdr)(rain) (mm h-1) dp (rain) (°) Zh(rain) (dBZ) Zdr(rain) (dB) R(Zh)(rain) (mm h-1) ~10 % (0.2 mm h-1) ~10 % (0.3 mm h-1) CONCLUSIONS based on the 15-Nov-case & OUTLOOK Assuming theoretical accuracies as shown in (black, horizontal lines), the critical level of clutter contamination for polarimetric parameters (black, vertical lines) is achieved when the clutter signal is: • 6 – 11 dBZ lower than that of rain for Zh • 7 – 20 dBZ lower than that of rain for Zdr • 10 – 26 dBZ lower than that of rain for hv • 6 – 23 dBZ lower than that of rain for dp 4.2. Assuming an theoretical accuracy in rain rate of ~10 %, the critical level for rainfall rate estimation is achieved when the clutter signal is: • 7 – 13 dBZ lower than that of rain for R(Zh) • 6 – 24 dBZ lower than that of rain for R(Zh,Zdr) Median dp(°) 0.005 1° dp (rain+clutter) – dp(rain) (°) hv (rain+clutter) – hv(rain) (°) Polarimetric variables and R(Zh,Zdr) are more sensitive to small amounts of ground clutter but also have a larger variability of the critical level compared to Zhand R(Zh) Median hv These results need to be verified by more cases with different rain rates and drop size distributions and the accuracy of R(Kdp), R(Kdp, Zdr) needs to be included. Zh(clutter) – Zh(rain) (dBZ) Zh(clutter) – Zh(rain) (dBZ) MeteoSvizzera, 6605 Locarno, Switzerland email: Katja.Friedrich@meteoswiss.ch http://www.meteoswiss.ch