Download

1 / 22
250 likes | 721 Views
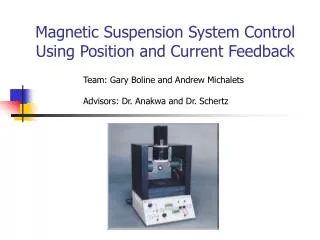
State Space Control of a Magnetic Suspension System. Margaret Glavin Supervisor: Prof. Gerard Hurley. Introduction. Proportional and Derivative Control PWM Control State Space Control Applications of the Suspension System. State Space Background. Developed since 1960’s

E N D
State Space Control of a Magnetic Suspension System Margaret Glavin Supervisor: Prof. Gerard Hurley
Introduction • Proportional and Derivative Control • PWM Control • State Space Control • Applications of the Suspension System
State Space Background • Developed since 1960’s • Modern control theory • State variable method of describing differential equations • Not one unique set of state variables to describe the state space of the system
State Equations dx/dt = Ax + Bu y = Cx + Du • A – State Matrix • B – Input Matrix • C – Output Matrix • D – Direct transmission Matrix
Block Diagram y + D + u + B 1/s C x’ x + A
Steps for State Space Design • State Matrices • Controllability and feedback gain • Observability and observer gain • Combine both • Introducing reference input
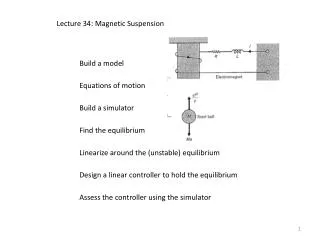
Equations • Differential equation for system • Transfer function
Methods to Calculate Space State Matrices from Transfer Functions • Canonical forms • Controllable canonical form • Observable canonical form • Jordan canonical form • Modal canonical form • Diagonal canonical form • MatLab
Controllability • Controllability matrix • Matrix rank is n or n linearly independent column vectors • If determinant is non zero system is controllable
Feedback Gain Matrix • Used to place the poles • If controllable poles placed at any location • Methods to calculate matrix • Direct substitution method • Transformation matrix • Ackermann’s formula
Reference Input • K matrix calculated with input set to zero • Kc input gain • Overcomes steady state error • Kc=(1/(C*(-1/(A-Bk))*B)
Observer • State variables not always available • Observer designed to estimate the state variables • Full state observer • Reduced state observer
Observability • Observability matrix • Matrix rank is n or has n linearly independent column vectors • Determinant is a non zero value
Observer Gain • Used to place the observer poles • Poles two to five times faster than controller poles • Same methods of calculation used as for feedback gain matrix
Simulink • Part of the Matlab Program • Used to draw and simulate block diagrams • Graphs at different points in the system can be plotted
PSpice • MicroSim Corporation • Designing and simulating circuits • Schematic capture or netlist • Libraries • Modelling transfer function • Saves time and money
Hardware • Building circuit • Testing circuit • Fault finding • Part of circuit already built
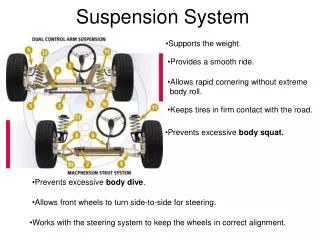
Applications • MagLev train • Floats above guide way • Two types • Reach speeds of 310 mph (500 kph) • Frictionless bearings