Download
1 / 10
110 likes | 532 Views
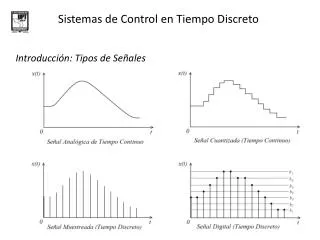
Sistemas de Control en Tiempo Discreto. Recordando la forma de la transformada de Laplace de una señal muestreada, se tiene que ésta es una función periódica, con una frecuencia igual a Se demuestra de la siguiente manera: Sea,

E N D
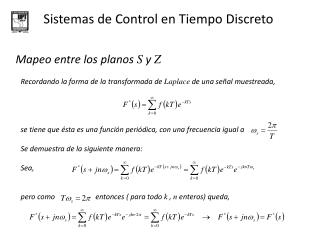
Sistemas de Control en Tiempo Discreto Recordando la forma de la transformada de Laplace de una señal muestreada, se tiene que ésta es una función periódica, con una frecuencia igual a Se demuestra de la siguiente manera: Sea, pero como entonces ( para todo k , n enteros) queda, Mapeo entre los planos S y Z
Sistemas de Control en Tiempo Discreto La interpretación de este resultado es que existen bandas horizontales en el plano S, tales que lo que pasa con en la banda fundamental se repite en el resto de las bandas complementarias; entonces se puede hacer el siguiente recorrido: Mapeo entre los planos S y Z
Sistemas de Control en Tiempo Discreto Recorrido sobre la banda fundamental y dentro del lado de estabilidad en S: Cualquier consideración que se haga bajo este recorrido, se repetirá dada la periodicidad de la función Mapeo entre los planos S y Z
Sistemas de Control en Tiempo Discreto El mapeo se da sobre la variable compleja, haciendo que En general: Es decir que Z tiene su módulo igual a y su fase como . Así por ejemplo: Gráficamente, Mapeo entre los planos S y Z
Sistemas de Control en Tiempo Discreto • Del mapeo se tienen las siguientes implicaciones: • El semiplano izquierdo de S corresponde al área interior del círculo unitario en Z. • (Región de Estabilidad) • Puntos hacia en S corresponden a un círculo de radio infinitesimal en Z. • Un lugar geométrico de parte real • constante en S se corresponde con • un círculo de radio en Z : • Un lugar geométrico de parte imaginaria • constante en S se traslada como una línea • recta con un ángulo en Z : Mapeo entre los planos S y Z
Sistemas de Control en Tiempo Discreto Considérese el siguiente diagrama de bloques: Luego, pero sabiendo del Espectro Frecuencialde una señal muestreada que, (Se propone su deducción) entonces, siendo que es periódica, resulta: Es decir, Función de Transferencia en Z
Sistemas de Control en Tiempo Discreto EJEMPLO 1: En el sistema se tiene que Hallar la función de transferencia discreta. Resp. Se tiene que, …o más simplemente, Con lo que de la tabla de la transformada Z se obtiene: Función de Transferencia en Z
Sistemas de Control en Tiempo Discreto EJEMPLO 2: Considérese el siguiente sistema, Aquí: luego, ¿Qué pasaría si se elimina el muestreo central? Diferente ! Función de Transferencia en Z
Sistemas de Control en Tiempo Discreto Sea el siguiente sistema con realimentación: Entonces se tiene, Así: Finalmente, Función de Transferencia en Cadena Cerrada
Sistemas de Control en Tiempo Discreto Otras configuraciones típicas: Función de Transferencia en Cadena Cerrada