Visual Perception
PhD Program in Information Technologies. Visual Perception. Description : Obtention of 3D Information. Study of the problem of triangulation, camera calibration and stereovision. Passive and active vision. Epipolar geometry and bidimensional transformations. Coordinator : Dr. Rafael Garcia

Visual Perception
E N D
Presentation Transcript
PhD Program in Information Technologies Visual Perception Description: Obtention of 3D Information. Study of the problem of triangulation, camera calibration and stereovision. Passive and active vision. Epipolar geometry and bidimensional transformations. Coordinator: Dr. Rafael Garcia Professors: Dr. Rafael Garcia “Rafa”, Dr. Joaquim Salvi “Quim”, Josep Forest “Pep”. Term: March – April Day & Time: Friday from 11 to 13 h. Place: Seminari EIA
Contents of the Course 1. Introduction to visual perception (2 hours) · Human vision. Image interpretation: brain vs. computer. Phases of image processing. Quim · CCD sensors. Type of cameras: matricial, linear, 1 CCD, 3CDD, Analog, Digital. Rafa 2. Camera modelling and calibration (2 hours) Quim Camera modelling, camera calibration: intrinsic and extrinsic parameters, stereo vision, epipolar geometry, fundamental matrix. Example: robot localization and 3D mapping. 3. Motion estimation. (4 hours) Rafa Trinocular stereovision. Deriving homographies from the projection matrix. Robust estimators. Aplications: motion estimation through mosaicking. Derivation of extrinsic parameters.
Contents of the Course 4. The correspondence problem. (2 hours) Rafa Detection of interest points. Finding correspondences. Similarity measurements. Aplying epipolar geometry. 5. 3D reconstruction using laser range finders. (2 hours) Pep Laser beam calibration. Subpixel slit detection. Scanning. 3D reconstruction. Examples. 6. Structured light (2 hours) Quim Pattern projection. Pattern coding. Time multiplexing. Spatial neighborhood. Direct codification. Designing and Implementing an optimal pattern. Practical issues: Modelization and calibration of a computer vision system and reconstruction of 3D objects.
Schedule of the course March 2004 April 2004 May 2004 Lesson Days Practical Issues presentation Second week of June
Introduction to Visual Perception • Human Vision: • Identify objects • Determine the shape • Locate its 3D position. Image acquisition Image interpretation
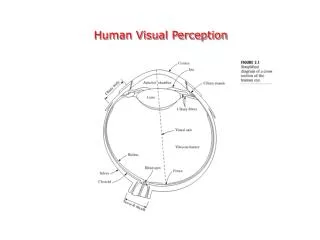
The Human Eye ? • Eye shape: • Cornea: Transparent surface. • Sclera: Outer cover composed of a fibrous coat that surrounds the choroid. • Choroid: a layer of blood capillaries. • Retina: layer inside the choroid composed of two types of receptors (rods and cones) and a netword of nerves. • Optic nerve: Retinal nerves leave the eye to the brain trough the optic nerve bundle. • Image enhancement: • Cornea: Transparent surface. • Lens: Focuses the light to the retina surface to perform proper focus of near and distant objects. • Iris: Acts as a diaphragm to control the amount of light entering the eye.
How an eye is working ? • Image acquisition: • Retina: Composed of • 100 M. Rods: Long slender receptors. • Sensitive at low levels of light. • 6.5 M. Cones. Shorter and thicker receptors. • Sensitive at high levels of light. • Greatest presence at the Fovea region (sharpest vision). • Three types of cones with different wavelength absorption with peaks in the blue, green and red light spectrum • Light stimulus activate a rod or cone producing a nerve impulse which is transmitted through the optic nerve. More information at: http://www.vision.ca/eye/lobby.html
Computer Vision: • Object Recognition. Object Localisation. • Advantage: Automatisation. • Constraint: Difficult to transmit the human intelligence and skills to a computer. • Applications: • Shape Inspection for quality control • Rapid Prototyping • Computer assisted surgery • Film making effects • Object picking • Robot Navigation Image acquisition Image interpretation
3D Information System selection Modelling Calibration Correspondence Get 3D Cloud Data Fusion
System Selection • Combination of computational and optical techniques aimed at estimating or making explicit geometric (3D shape) properties of objects or scenes from their digital images. • stereovision • pattern projection • laser scanning • shape from X (motion, texture, shading, focus, zoom) • Computation for all or some pixels of the distance between a known reference frame and the scene point that is imaged in those pixels. The output is a range image (depth map) or a cloud of points {(xi, yi, zi), i=1..N}. • The fusion of several range images or point clouds corresponding to partially different views of an object may yield its full 3D digitization.
Main processes in 3D digitization solid(triangles) graphicsurface N 3D point clouds Range sensing Geometric fusion Objectmodeling object solid (splines) System Selection best nextview Sensorplanning • Stereovision • Pattern projection • Laser scanning • Shape from X • (motion, texture, shading, focus, zoom) Texturemapping coloured solid
Geometric fusion 24 aligned 3D scans ready for merging set of six 3D scans acquired from different viewpoints and their alignment (center) 24 meshes merged into a surface triangulation.