Download
1 / 16
160 likes | 325 Views
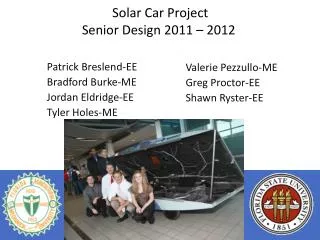
ASV Senior Design Project Midterm Report Fall 2012. Team: Leader: Daniel Becker Treasurer: Andrew Hinojosa Manufacturing: Samantha Palmer Design/Assembly: Bradley Shallcross. Fabrication of Car. Two servos are connected Rangefinders are being added

E N D
ASV Senior Design ProjectMidterm ReportFall 2012 Team: Leader: Daniel Becker Treasurer: Andrew Hinojosa Manufacturing: Samantha Palmer Design/Assembly: Bradley Shallcross
Fabrication of Car • Two servos are connected • Rangefinders are being added • Xbee communication is in the development stage • Integration between Car/Crane/ASV on the way
Logic of the Car/Crane • Logic for all the systems is still in the development phase. • Logic paths are ready for programming. • Need to learn the syntax of arduino to complete coding.
Initial Search Pattern • Car rotates 360° • Duel sensors recognize if object is in front of car • Car drives straight to object
Failsafe Search Grid • Car drives straight until edge • Car follows edge • On reaching a corner car follows a sweep pattern
Current Status on Retrieval Mechanism • Due to no funding the work on this area has been postponed • The work already done will be a good basis for future semesters to work with.
Crane Progress • Most of the structural material has arrived. • Still waiting for the motors and belts/gears.
Displacement Analysis • A CAD analysis has been conducted. • Each design has benefits and disadvantages. • We need to have the least weight possible while keeping rigidity.
“Cantaleiver Bar” or Supported? Weight: 2.72lb Deflection: .26” Weight: 3.57lb Deflection: .137”
1” or 2” Diameter? Weight: 1.76lb Deflection: 2.34” Weight: 3.57lb Deflection: .137”
Counter balance or no? Weight: 4.89lb Deflection: .136” Weight: 3.57lb Deflection: .137”
Crane Stress Analysis • Normal Force • Bending moment • Inertial Moment(Hallow pipe) • Shear Stress
Crane Deflection Analysis • Normal Deflection • Angular Deflection θ = L T / Ip G = L T / (π D4/32) G
Autonomous Surface VehicleWebsite • For more information on the current project, visit: http://dasp.mem.odu.edu:8080/~asv_fa12/index.htm