Download
1 / 22
220 likes | 238 Views
Learn about the equations involved in DC motors and how speed control is manipulated. Explore factors influencing EA and τind, terminal characteristics, speed regulations, and applications of DC motors.

E N D
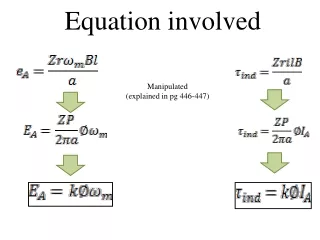
Equation involved Manipulated (explained in pg 446-447)
EA depends on 3 factors: • Flux in the machine, ϕ • Speed of the machine’s rotor, ωm • Constant depending on the construction of the machine
τind depends on 3 factors: • Flux in the machine, ϕ • The armature current, IA in the machine • Constant depending on the construction of the machine
DC Motor • Will be given in class
AND SHUNT MOTOR SEPARATELY EXCITED Note: When the V = constant, there is no practical difference in behavior between separately excited and shunt motor.
Speed control of Shunt Motor • Adjusting the field resistance ,Rf (to control ϕ) • Adjusting the terminal voltage, VT applied to the armature • Inserting a resistor in series with the armature circuit
Speed control of Series Motor • . • . • .
Speed control of compound motor • Change the field resistance, Rf • Change the armature resistance, Ra • Change the armature voltage, VA
DC MOTOR STARTER • When motor is at rest, there is not yet a back e.m.f. • When the full supply voltage is applied, then the starting current is very high because the armature resistance, RA is very small. • This excessive starting current will blow out fuses and may damage the brushes too. • To avoid this starting current, a resistance is inserted in series with the armature and is gradually cut out as the motor gains speed and develops the back e.m.f which then regulates in speed.
Speed Regulations • DC motors are often compared by their speed regulations. • Speed Regulations (SR) of the a motor is defined by or
Efficiency of motor To calculate the efficiency of a dc motor, the following losses must be determined: • Copper losses • Brush drop losses • Mechanical losses • Core losses • Stray losses