Download
1 / 42
420 likes | 473 Views
Explore the basic concepts, operation, and structure of GPS for precise satellite positioning. Learn about satellite transmissions, signal characteristics, and GPS signal structure. Discover how GPS receivers compute position and time based on satellite signals.

E N D
BASIC CONCEPTS Satellitepositioning Point Positioning
Satellitepositioning Relative Positioning
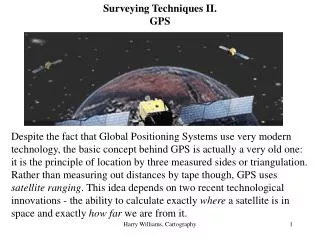
Satellite observations • Directions: • Photograph satellite against a star background. • Interpolate direction to satellite from known co-ordinates (right ascension, declination) of stars. No longer used. • Ranges: • Pulsed laser (SLR), or time codes superimposed upon microwave radio carrier signals (GPS) • Range Rate: • Doppler shift in frequency of received radio signal can be integrated to obtain change in range – related to relative position of transmitter and receiver (DORIS, Argos, SARSAT)
Basic concepts of GPS • Developers are US military and for USSR • Joint Use Policy since 2004 (Defence, Transportation) • Position, Navigation & Timing (http://pnt.gov) • Fully operational since 1995
Basic concepts of GPS • Four GPS satellites • Four Ranges • 3D Position & Time
How doe these satellites provide positional information? • Each satellite broadcasts its orbital position in “pseudo code” • The receiver on the ground calculates the time the signal (pseudo code) took to get from the satellite to ground and turns these time units into distance based on the speed the light travels at (“pseudorange”) • Using information from 3 to 4 satellites allows triangulation to the GPS receivers position.
Basic concepts of GPS Observation Equation: Four unknowns – solve for xP, yP, zP, dtP
Control Segment Master Control Station Monitor Station Ground Antenna US Space Command Cape Canaveral Hawaii Kwajalein Atoll Diego Garcia Ascension Is.
Tasks of the ground segment: • Controlling and managing the telemetry and control stations. • Computation of ephemerids (orbit parameters) for each satellite. • Ordering satellite maneuvres. • Computing the data for the almanach • Determine the GPS time (Atomic hr) • Communication link to the satellites
Space Segment 24 satellite vehicles • Six orbital planes • Inclined 55o with respect to equator • Orbits separated by 60o • 20,200 km elevation above Earth • Orbital period of 11 hr 55 min • Five to eight satellites visible from any point on Earth
GPS Satellite Vehicle • Four atomic clocks • Three nickel-cadmium batteries • Two solar panels • Battery charging • Power generation • 1136 watts • S band antenna—satellite control • 12 element L band antenna—user communication
GPS Satellite Vehicle • Weight • 2370 pounds • Height • 16.25 feet • Width • 38.025 feet including wing span • Design life—10 years Block IIR satellite vehicle assembly at Lockheed Martin, Valley Forge, PA
User segment • GPS receivers • track L1 and/or L2 frequencies • track C/A code for at least 4 satellites, and demodulation • Time synchronization (Quartz clocks in the receivers) • Decrypt satellite data from the code observations (orbit, etc.) • receive P(Y) code (US Army) • Compute the pseudo-range to each satellite • Compute the time offset (receiver clock error) • Compute the position.
GPS Signal Structure • GPS Signal • Method (code) to identify each satellite • The location of the satellite or some information on how to determine it • Information regarding the amount of time elapsed since the signal left the satellite • Details on the satellite clock status
Important Issues to Consider • Methods to encode information • Signal power • Frequency allocation • Security • Number and type of codes necessary to satisfy system requirements
Overview of Satellite Transmissions • All transmissions derive from a fundamental frequency of 10.23 Mhz • L1 = 154 • 10.23 = 1575.42 Mhz • L2 = 120 • 10.23 = 1227.60 Mhz • All codes initialized once per GPS week at midnight from Saturday to Sunday • Chipping rate for C/A is 1.023 Mhz • Chipping rate for P(Y) is 10.23 Mhz
Digital Modulation Methods • Amplitude Modulation (AM) also known as amplitude-shift keying. This method requires changing the amplitude of the carrier phase between 0 and 1 to encode the digital signal. • Frequency Modulation (FM) also known as frequency-shift keying. Must alter the frequency of the carrier to correspond to 0 or 1. • Phase Modulation (PM) also known as phase-shift keying. At each phase shift, the bit is flipped from 0 to 1 or vice versa. This is the method used in GPS.
GPS Signal Structure • Binary message format and NMEA format • Binary message format • Header portion (compulsory) • Data portion (optional)
Binary Messages • Example of binary messages: Aim: To disable the pinning feature Status of pinning is seen in User setting Output(Msg ID 1012) O/P message Pinning is controlled using Nav configuration (Msg ID 1221) I/P message
Binary messages • I/p to the GPS to see the status of pinning • Header format 81 ff sync word 03 f4 Msg ID 00 00 data count 48 00 query bit set 32 0d check sum In response to this the GPS outputs User settings output message. (least significant byte first) ff81 f403 1000 0048 ---- ---- ---- ---- 0000 ---- ---- The 5th bit in the 9th word of the above msg gives the status of pinning
Binary message • I/p message to change status of pinning • In the header • Msg Id becomes 04 C5 (nav configuration ) • Here the message also includes a data portion. • 2nd bit of the 7th word in the data portion is set to 1 to disable the pinning • The header checksum and data check sum must be correct for the message to be valid. • Whether pining is disabled can be checked by sending the previous msg again. Now ff81 f403 1000 0048 ---- ---- ---- ---- 7800 ---- ----
NMEA messages • These are standardized sentences used in context with the GPS • Examples: O/P statements • GGA: GPS fix Data • GSA: GPS DOP and active satellite • GSV: GPS Satellite in view • RMC: recommended min GPS data • I/P messages • IBIT Built In test command • ILOG log control • INIT Initialization • IPRO Proprietary protocol
NMEA messages Sample Message $GPRMC,185203,A,1907.8900,N,07533.5546,E,0.00,121.7,221101,13.8,E*55 $ Start of sentence Type of sentence UTC Validity Latitude & orientation Longitude & orientation Speed Heading Date Magnetic variation and orientation Checksum (followed by <CR> and <LF> )
Anti-spoofing • Anti- spoofing denies the P code by mixing with a W-code to produce Y code which can be decoded only by user having a key. • What about SPS users? • They use cross correlation which uses the fact that the y code are the same on both frequencies • By correlating the 2 incoming y codes on L1 and L2 the difference in time can be ascertained • This delay is added to L1 and results in the pseudorange which contain the same info as the actual P code on L2
GPS Satellite Signal: • L1 freq. (1575.42 Mhz) carries the SPS code and the navigation message. • L2 freq. (1227.60 Mhz) used to measure ionosphere delays by PPS receivers • 3 binary code shift L1 and/or L2 carrier phase • The C/A code • The P code • The Navigation message which is a 50 Hz signal consisting of GPs satellite orbits . Clock correction and other system parameters
Selective Availabity • Two components • Dither : manipulation of the satellite clock frequency • Epsilon: errors imposed within the ephemeris data sent in the broadcast message • De-activated 2, May, 2000.
GPS Surveying • Traversing • Triangulation Base - Rover Methods