Enhancing Position Control for WAM with PID: Debugging Newton Euler Function
Implementing PID control for a WAM robot, focusing on position control with some issues, exploring gains setting and debugging Newton Euler function. Next steps include finishing position control and creating a Simulink model for trajectory testing.

Enhancing Position Control for WAM with PID: Debugging Newton Euler Function
E N D
Presentation Transcript
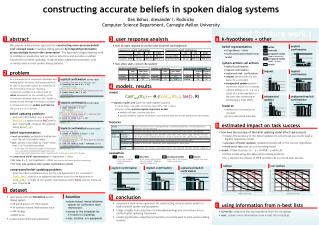
Current Work • PID control to direct WAM to given position • I am now calculating desired qdd (instead of torques) in PID and sending that to Newton Euler's qdd port • Is working somewhat strangely (especially for joint 3) – very high gains for joint 3 give relatively low torques after Newton Euler. PID gives the proper output though. Leads me to believe there is an error in my NE function... will try and debug... • Side thought - should I be setting gains individually for each joint OR one gain for each of Kp, Kd, Ki which is applied to all joints? In other words, should I have 3 separate gains or 3*4=12 separate gains? Is the best way to find optimal gains guess and check? Has been somewhat tedious. If I should use simulation, can you point me in the right direction of what dynamics equations to use?
What's Next • Finish position control • Create Simulink model for a simple WAM trajectory • Test and debug Simulink model for Barrett Hand • Coordinate the trajectory model and the hand model