Advanced Robotics Control System Development for Barrett Hand
Addressing friction issues in PID control, implementing Ziegler Nichols method, Simulink serial communication, and more for Barrett Hand robotics experimentation.

Advanced Robotics Control System Development for Barrett Hand
E N D
Presentation Transcript
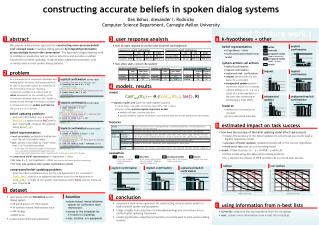
Current Work • Have not yet heard back from Barrett regarding friction • Friction is interfering in another sense - since the PID outputs joint accelerations to RNE, if friction is too high we actually aren't accelerating as much as expected so RNE overshoots the centrifugal/coriolis terms on other joints • A student from WPI recommended Ziegler Nichols method • A student from Yale said she has seen similar friction curves on a different robotic arm • Working on Simulink serial communication • Got the hand initialize to go over the COM port! • Trying to figure out how to best do synchronous I/O using Simulink, Mathworks tech support is helping
What's Next • Finish position/trajectory control (once I have the gains and friction compensation this should work well) • Integrate blending into the points of the trajectory so we get smooth velocity/acceleration • Incorporate UDP trajectory control for sending position commands • Test and debug Simulink model for Barrett Hand (start here while we wait for Barrett) • Coordinate the trajectory model and the hand model • Grasping Experiments