Automatic Merge Control Algorithms
Automatic Merge Control Algorithms. Ashish Gudhe Roll. No. 05305028 Guide :- Prof. K. Ramamritham. Roadmap. Aim of this project Introduction to Automatic Merge Control(AMC) Existing AMC algorithms Proposed AMC algorithms Experiments Conclusion Future Work Video Reference.


Automatic Merge Control Algorithms
E N D
Presentation Transcript
Automatic Merge Control Algorithms Ashish Gudhe Roll. No. 05305028 Guide :- Prof. K. Ramamritham
Roadmap • Aim of this project • Introduction to Automatic Merge Control(AMC) • Existing AMC algorithms • Proposed AMC algorithms • Experiments • Conclusion • Future Work • Video • Reference
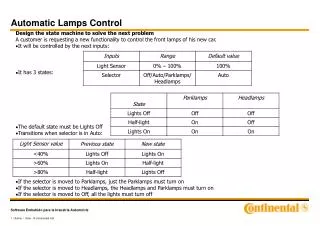
Aim of this project • Understand AMC • Primary Aim : Safety at intersection of lanes • Secondary Aim : • Increase Traffic Throughput • Minimize Time To Merge • Design AMC algorithms. • Study performance of the algorithms. • Perform experiments on vehicular platforms.
Introduction to AMC system What is Automatic Merge Control (AMC)? • Automotive Application for automated merging of vehicles in the intersection region. • Determines merge order of vehicles. • Safety-Critical Application.
Some definitions in AMC system • Time To Merge (TTM):- It is the time required by a vehicle to reach the intersection region from current position. • Merging Sequence:- It is the order in which vehicles merge at the intersection. • Area of Interest (AoI):- The area defined by radius R where all vehicles in this area become part of AMC algorithm. • Safety Distance :- The minimum separation the vehicles need to maintain at any instant of time.
AMC Algorithms • Existing algorithms • Optimization formulation • Head of Lane Approach (HoL1) • Virtual Vehicle based merging. • Proposed algorithms • Virtual Vehicle based merging. • Head of Lane Approach (HoL2). • All Sequences Minimal Cost (ASMC).
Optimization Formulation[6] • Merging problem is formulated as an optimization problem. • Input : Vehicles’ profiles. • Output: TTM of each vehicle. • Objective function is to minimize the average TTM. • Constraints:- • Precedence Constraint • Mutual Exclusion Constraint • Lower bound on TTM • Drawbacks : • Non-linear constraints. Global optimum not guaranteed. • Computationally intensive.
Head of lane is the leader vehicle. Merge sequence is generated iteratively by inserting selected head vehicle. Merging Decision : To select either V11 or V21. Accelerate both the vehicles to tolerable limits. Insert Nearest Head vehicle in case of interference. Choose the next vehicle in the lane as new head of lane. Insert the vehicle with smaller TTM and the next vehicle in same lane becomes new head of lane. HoL Approach[7] : HOL1
Virtual Vehicle based Merging • Virtual vehicle[4] is an image of actual vehicle mapped on other lane. • Longitudinal control using Adaptive Cruise Control (ACC)[1]. • The virtual vehicle becomes lead vehicle. • ACC with virtual vehicle. • Selection of vehicle as a virtual vehicle depends upon two main criteria :- • Spatial proximity • Temporal proximity
Virtual Vehicle based Merging • Choice of virtual vehicle depends on following criteria:- • Spatial Proximity • e.g., V2 is mapped as V2’ • Temporal Proximity • e.g., V1 is mapped as V1’
Zonal distribution of AoI Zone 3 monitors the number of vehicles entering the AoI. Zones 1 and 2 define the two modes of system operations (communication, vehicle mapping, ACC, etc.) The frequency of operations of vehicles in Zone 1 can be double that of in Zone 2. Area based mode change. Better control expected close to intersection region. Zone sizes can be made flexible to handle traffic of various natures. Virtual vehicle based merging
All Sequences Minimal Cost (ASMC) Approach • Generates all possible valid merge sequences. • Outputs the best merge sequence i.e. one with minimal merging cost. • Recursively computes the valid sequences by dividing the merging problem with n vehicles to merging problem with (n-1) vehicles. • Guarantees optimal solution. • Computationally intensive and space consuming. • Benchmark for comparing performance of other approaches.
where:- S1 = set of vehicles on lane 1 S2 = set of vehicles on lane 2 refVehicle : reference vehicle w.r.t which behavior of remaining vehicles is computed. ASMC algorithm short description
HoL2 approach • Cascading effect considered • Merge sequence generated based upon effect on the subsequent vehicles. • Effect in terms of TTM • Effect in terms of deceleration • Effect in terms of number of vehicles being affected
AMC algorithms take static snapshot of vehicles Merge sequence generated considering this snapshot How to handle continuous stream of vehicles entering Area of Interest? Time based approach where snapshot is taken in regular intervals of time. Zonal distribution of Area of Interest where the AoI is divided into zones and snapshot timing depends on certain criteria. Extensions to AMC algorithms : Handling continuous streams of vehicles
Zonal distribution of AoI • Z1: Zone 1 closest to intersection region. Vehicles’ profile remain unchanged in this zone • Z2:Zone 2 of which snapshot is taken. All vehicles in this zone are part of AMC algorithm. • Z3: Covers entire AoI along with Z1 and Z2. Farthest zone which tracks new vehicles that are about to enter Z2.
Extensions to AMC algorithms cont… • Snapshot timing • After a new vehicle enters zone Z2 • more computations • high prob. of same vehicle being included in successive snapshot. • After zone Z2 of any lane becomes empty : • lesser computations • low prob. of same vehicle being included in successive snapshot.
Virtual Vehicle experiment • ACC enabled vehicle VACC • Cruise controlled vehicle VCC • Local learning with position feedback • Initial distance from intersection is fixed : SACC=1000mm and SCC=500mm. • Current position computed from position feedback.
Virtual Vehicle experiment cont… • Spatial proximity is used as the criteria for virtual vehicle mapping. Hence, VCC is mapped as virtual vehicle ahead of VACC. • VCC communicates its current location to VACC • VACC computes the separation distance from the virtual vehicle. • VACC performs ACC with the virtual vehicle.
Virtual vehicle merging results Velocity(VACC)=100 mm/sec and Velocity(VCC)=50mm/sec and desired time gap was set to 1sec. Final velocity of VACC=50mm/sec approx. The vehicle VACC follows the virtual lead vehicle with time gap between 1 to 1.5 sec.
Virtual vehicle merging results • The initial distances of VACC and VCC are 1000mm and 500mm respectively from intersection region. • Y-axis denotes the distance from intersection region. • Safety is ensured at the intersection region.
C++ Simulation experiments (case 1) Vehicle parameters : Velocity bounds = [0,27] m/s Acceleration bounds = [-4,4] m/s2 Safety distance = 5m. Vehicle profiles at time t=0
Total TTM ASMC = 14.12 sec HoL1 = 15.011sec HoL2 = 14.12 sec Here HoL2 performs better than HoL1. Comparative results (case 1)
Graphs (case 1) ASMC HoL2
Vehicle parameters :- Velocity bounds = [0,27] m/s Acceleration bounds = [-4,4] m/s2 Safety distance = 5m Vehicle profiles at time t=0 C++ Simulation experiments (case 2)
Total TTM ASMC = 17.63 sec HoL1 = 17.84 sec HoL2 = 18.65 sec Here HoL1 performs better than HoL2 Comparative results (case 2)
Graphs (case 2) ASMC HoL1
Conclusions • Comparative study of Automatic merge control algorithms. • Few approaches are proposed which ensure safety and high traffic throughput. • The HoL1 approach is observed to perform better than HoL2 in certain scenario and vice-versa.
Future work • To study the performance of the AMC algorithms on continuous streams of vehicles. • To perform experiments on robotic vehicular platforms. • To design and implement a decentralized controller for decision making i.e. to allow vehicles to take decision. • To study vehicle-to-vehicle communication aspects. • Post-merging safety and stability.
References [1] Gurulingesh G., Neera Sharma, K. Ramamritham and Sachitanand M. Efficient Real-Time Support for Automotive Application : A Case Study. In Proceedings of the RTCSA 2006, Sydney, Australia, Aug 2006. [2] Xiao-Yun Lu. and Hedrick K.J. Longitudinal control algorithm for automated vehicle merging. In Proceedings of IEEE Conference on Decision and Control, volume 1, pages 450-455,2000. [3] Hossein Jula, Elias B. Kosmatopoulos, and Petros A. Ioannou. Collision Avoidance Analysis for Lane Changing and Merging. In IEEE Transactions on Vehicular Technology, volume 49, pages 2295-2308, Nov 2000. [4] A. Uno, T. Sakaguchi, and S. Tsugawa. A merging control algorithm based on inter-vehicle communication. In Proceedings of IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems 1999, pages 783-787, 1999. [5] Steven E. Shladover Xiao-Yun Lu., Han-Shue Tan. and J. Karl Hedrick. Implementation of longitudinal control algorithm for vehicle merging. In Proceedings of AVEC 2000 5th International Symposium on Advanced Vehicle Control, Ann Arbor, Michigan, Aug 2000. [6] Gurulingesh G., J Bharadia and K. Ramamritham. Towards Intelligent Vehicles : Automatic Merge Control. In RTSS Workshop 2006, Brazil, Dec 2006. [7] Vipul Shingde. Report on Automatic Merge Control, Indian Institute of Technology, Bom- bay. 2006.
Thank you Prof. A A Diwan Prof. Kavi Arya Prof. Krithi Ramamritham Gurulingesh R Vipul Shingde Sachitanand Malewar
Components of AMC System • Local Learning (e.g. GPS, roadside sensors, etc.) • Communication capability • Inter-Vehicle communication • Vehicle-Roadside communication • Sensors • Speed • accelerometer • Vehicle Profile • Controller • Centralized (Intersection manager) • Decentralized
Assumptions in AMC algorithms • Vehicles are treated as points on the lane. • Vehicles know their location from intersection region. • Intersection manager exists at the intersection region. It does all the computations and controls the merging. • Communication exists between vehicles and intersection manager. • Vehicles are initially separated by safety distance. • Vehicles’ control system is reliable i.e. vehicles follow the behavior as commanded by intersection manager.
Optimization formulation[6] • Minimize • Subject to • Precedence constraint where is TTM of jth vehicle of ith lane and • Mutual exclusion constraint • Where S=safety distance • Lower bound on TTM • is max. velocity