Understanding Linear and Rotary Encoders: Functionality and Applications
1.18k likes | 1.4k Views
This article explores linear and rotary encoders, essential sensors for determining position. Linear encoders convert position into analog or digital signals using various technologies, including optical and magnetic systems. They are vital in high-precision tools such as digital calipers and coordinate measuring machines. Rotary encoders, also known as shaft encoders, translate angular position into code for applications in robotics, industrial controls, and more. Both encoder types include absolute and incremental forms, each suited for different measurement needs and precision levels.

Understanding Linear and Rotary Encoders: Functionality and Applications
E N D
Presentation Transcript
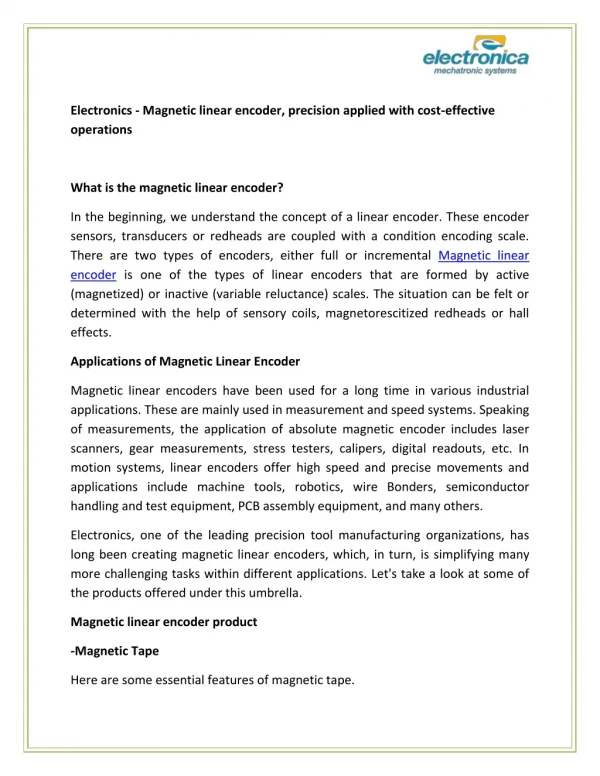
Linear encoder A linear encoder is a sensor, transducer or readhead paired with a scale that encodes position. The sensor reads the scale in order to convert the encoded position into an analog or digital signal, which can then be decoded into position by a digital readout (DRO) or motion controller. The encoder can be either incremental or absolute. Motion can be determined by change in position over time. Linear encoder technologies include optical, magnetic, inductive, capacitive and eddy current. Optical technologies include shadow, self imaging and interferometric. Linear encoders are used in metrology instruments and high precision machining tools ranging from digital calipers to coordinate measuring machines
Rotary encoder A rotary encoder, also called a shaft encoder, is an electro-mechanical device that converts the angular position of a shaft or axle to an analog or digital code, making it an angle transducer. Rotary encoders are used in many applications that require precise shaft unlimited rotation—including industrial controls, robotics, special purpose photographic lenses[1], computer input devices (such as optomechanical mice and trackballs), and rotating radar platforms. There are two main types: absolute and incremental (relative). Mechanical absolute encoders- Absolute rotary encoder ROD 425
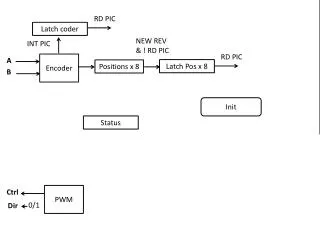
Optical absolute encoders Standard binary encoding Rotary encoder for angle-measuring devices marked in 3-bit binary. The inner ring corresponds to Contact 1 in the table. Black sectors are "on". Zero degrees is on the right-hand side, with angle increasing counterclockwise. An example of a binary code, in an extremely simplified encoder with only three contacts, is shown below. In general, where there are n contacts, the number of distinct positions of the shaft is 2n. In this example, n is 3, so there are 2³ or 8 positions.
Gray code The reflected binary code, also known as Gray code after Frank Gray, is a binary numeral system where two successive values differ in only one bit. The reflected binary code was originally designed to prevent spurious output from electromechanicalswitches. Today, Gray codes are widely used to facilitate error correction in digital communications such as digital terrestrial television and some cable TV systems.
LM10 linear magnetic encoder system • The LM10 features a compact sealed readhead that rides at up to 1.5 mm from the self-adhesive magnetic strip scale, which brings 100 m travel. • Simple to install, the LM10 features an integral set-up LED on the readhead, wide installation tolerances and an applicator tool for the adhesive-backed magnetic scale. A bidirectional reference is provided that can be either actuated by a preset mark integrated within the scale or by adding a reference sticker on top of the scale with the help of a self aligning installation tool. • The encoders come in digital or analogue output variants and offer a range of customer selectable resolutions 1 µm, 2 µm, 5 µm, 10 µm, 20 µm and 50 µm. The LM10 is capable of velocities up to 25 m/s; even at 1 µm resolution it is capable of 4 m/s.