Download
1 / 76
760 likes | 773 Views
This thesis explores the use of sun and terrain knowledge to enhance the performance of remote outdoor robotic explorers. It presents new navigational abilities such as sun-following and sun-seeking driving, solar-powered coverage, and time-dependent environmental modeling for navigational planning. The results show improvements in robot performance and potential for autonomous emergency recovery.

E N D
Solar Based Navigational Planning for Robotic Explorers Kimberly Shillcutt Robotics Institute, Carnegie Mellon University October 2, 2000
Thesis Statement Sun and terrain knowledge can greatly improve the performance of remoteoutdoor robotic explorers.
Preview of Results • New navigational abilities are now possible • Sun-following, or sun-synchronous driving • Sun-seeking, Earth-seeking driving • Solar-powered coverage • Time-dependent, environmental modeling is incorporated in navigational planning • Prediction of solar power generation • Robot performance improvements
Outline • Motivation & Goals • Approach • Sun Position Calculation • Solar Navigation • Coverage Patterns • Evaluation Algorithms • Results • Field Work • Simulations • Conclusions & Significance • Future Work
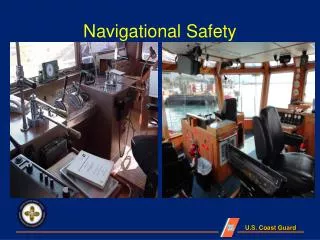
Motivation • Robotic exploration of remote areas • Autonomous Close, continual contact not available – emergency assistance may not even be possible
Motivation • Robotic exploration of remote areas • Autonomous • Self-powered Critical need for power – solar energy is a prime source, but is highly dependent on environment and terrain
Motivation • Robotic exploration of remote areas • Autonomous • Self-powered • Navigation-intensive Systematic exploration is best served by methodical coverage patterns, while extended exploration requires long-range paths
Goal #1 • Enable navigation throughout region while remaining continually in sunlight. • Polar regions: • Continual sun • Low sun angles • Long shadows • Vertical solar panels
Goal #2 • Long-range navigation • Improve the efficiency, productivity and lifetime of solar-powered robots performing coverage patterns. • Fixed solar panels • Emergency battery reserves
Goal #3 • Long-range navigation • Regional coverage • Enable autonomous emergency recovery by finding short-term paths to locations with sun or Earth line-of-sight. • On-board information
Approach • Sun Position Calculation • Solar Navigation • Shadow maps • Coverage Patterns • Task simulation • Solar power generation • Pattern selection
Sun Position Calculation • Surface location planet latitude & longitude • Latitude & longitude + time Sun (and Earth) position • Sun position + terrain map shadowing
Lunar Surface Example Input: robot location Input: time and date
Shadow Map • Shadowing determined for each grid cell of map, for given date and time • Shadow snapshots combined into animation Example: • Lunar South Pole, summer (April 2000) • Sun elevation ~ 1.5 degrees at pole
Solar Navigation • Time-dependent search through terrain map, grid cell by grid cell, identifying whether locations are sunlit as the simulated robot arrives • Guided sun-synchronous search circumnavigates terrain or polar features • Can access pre-calculated database of shadow maps • Sun-seeking (or Earth-seeking) search finds nearest location to be lit for required time • Utilizes a sunlight (Earthlight) endurance map
Coverage Patterns • Evaluation of navigational tasks • Tasks occur over time • Robot position changes over time • Sun and shadow positions change over time • Need to predict changing relationship between robot, environment, and results…
Task Simulation • Coverage patterns • Straight rows, spiral • Sun-following • Variable curvature
Task Simulation • Simulate set of potential navigational tasks under the applicable conditions • Coverage patterns • Evaluate attributes of the tasks • Power generation • Power consumption • Area coverage, etc. • Select best task based on desired attributesfor the robot’s mission
Predicting Solar Power Generation • Robot coordinates surface latitude & longitude • Latitude & longitude + time + map sun and shadow positions • Sun position + solar panel normal incident sunlight angle θ • Solar power = cos(θ) * power/panel
Other Evaluation Models • Power consumption modeled on statistical field data • Area coverage and overlap grid-based internal map keeps track of grid cells seen • Timesimple increment each pass through simulation loop • Wind power generationassumes predictable wind speed and direction
Implementation Sun position algorithm Coverage pattern algorithms Evaluation algorithms On-board planning library used infield work and simulations
Results • Field Work • Accuracy of solar power prediction • Simulations • Pattern characteristics • Effect of pose uncertainty • Potential numerical improvements • Examples of solar navigation
Robotic Antarctic Meteorite Search Solar panel normal is 40° above horizontal
Field Results • Nomad tested in • Pittsburgh • Williams Field • Elephant Moraine • Straight rows & spiral patterns performed at each location Recorded Values DGPS position Roll, pitch, yaw Solar panel current output Motor currents & voltages Timestamp Wind speed & direction Modeled output of: Solar power generation Area coverage & overlap
Field Results - Pittsburgh • Nomad tested in • Pittsburgh • Williams Field • Elephant Moraine 32+ days of data at slag heaps, 1998-1999 Coverage pattern development Maneuvering tests Initial solar panel testing
Field Results - Antarctica • Nomad tested in • Pittsburgh • Williams Field • Elephant Moraine 8 days of test data, Dec 1999-Jan 2000 Image segmentation tests Final search integration Pattern trials
Field Results - Antarctica • Nomad tested in • Pittsburgh • Williams Field • Elephant Moraine 17 days of test data, Jan 2000 10 official meteorite searches 5 meteorites autonomously identified Pattern trials
Solar Power Predictability • Two types of simulations: • Concurrent simulation, real-time, based on actual robot pose and model of solar panels • A priori simulation, predictive, based on pattern parameters and starting time • How does a priori simulation match actual power generated? Is it sufficient to distinguish between pattern types?
Actual vs. Concurrent Simulation Straight Rows Spiral
A Priori Prediction Accuracy mean error0.65% mean error1.25% Straight Rows Spiral Time (s) Time (s)
Simulation Results • Pattern characteristics eliminate unnecessary simulations • Simple heuristics • Analytical evaluations • Including terrain shadowing • Effect of pose uncertainty • Potential numerical improvements
Pattern Evaluation Heuristics • Over 80 pattern variations evaluated • Heuristics for limiting evaluation sets • Straight rows solar power generation varies sinusoidally with initial heading • Spiral pattern direction makes little difference in evaluations
Analytical Evaluations • Variable Curvature Patterns • Most evaluation category totals can be approximated as analytical functions of curvature, for given row lengths • Solar energy generation depends on location and latitude also • Resulting equations can be used in an optimization function, given desired weighting of each evaluation category, without complete simulation of each pattern
Area Coverage and Overlap • Sharper curvature combined with longer rows produces less coverage and more overlap
Area Coverage and Overlap y position (m) x position (m) Area Area Coverage Overlap -200m curvature
Area Coverage and Overlap y position (m) x position (m) Area Area Coverage Overlap -40m curvature
Area Coverage 100m row length, 5m row width,3000m total length Area = -878,395 ρ-2 + 87 ρ-1 + 1655 ρ = radius of curvature, [-300, 300]m max δ < 5.8% (using 4th order polynomial, max δ < 0.9%)
Solar Energy Generated • Patterns start with optimal sun heading • Sharper curvatures (small radii) remain in optimal heading for shorter time, reducing power generation
Terrain Shadowing • Straight rows patterns covering two regions, with variable starting positions, headings, and times
Terrain Shadowing Start Times
Pattern Characteristics Summary • Reduction of simulation set by using heuristics to eliminate near duplicates • Analytical evaluation of variable curvature patterns without complete simulation • Identification of similarities between starting locations for patterns in shadowed terrain
Pose Uncertainty • Pose variations relative robot-sun angle variations power generation variations • How unpredictable can the solar power variations be?
Pose Uncertainty • Simulations vary robot pitch and roll with a randomized Gaussian distribution: 1° 2° 5° 8° • Multiple pattern runs with each value of uncertainty, at each location
Minor Power Generation Effects • Power varies as cosine of angle large angular deviations required to produce noticeable drop-off in results • Replaying actual field data without pitch/roll results in evaluation differences of < 1.3% from original • Differences between straight rows and spiral patterns in Elephant Moraine were > 50%
Mission Scenarios • Power model: • Solar power generation • Battery reserve charging/discharging • Power consumption • Mission: • Total driving time/path length specified • Randomized target stops lasting about 5 minutes each, with/without point turns to optimal headings • When battery state < 20% capacity, robot stops, point turns to best heading, recharges to 99%
Sample Results Lifetime = time until first recharging stop Mission Time = total time to completion Straight Spiral Sun-Following Curved
Results: 60-89ºS range • Lifetime improvements, no targets • 23%-143%, Earth • 123%-161%, Moon • Productivity improvements, Earth • 16%-51% savings, with target stops • 14%-24% savings, no target stops • Time savings, Earth • 21%-58% savings, with target stops • 18%-31% savings, no target stops