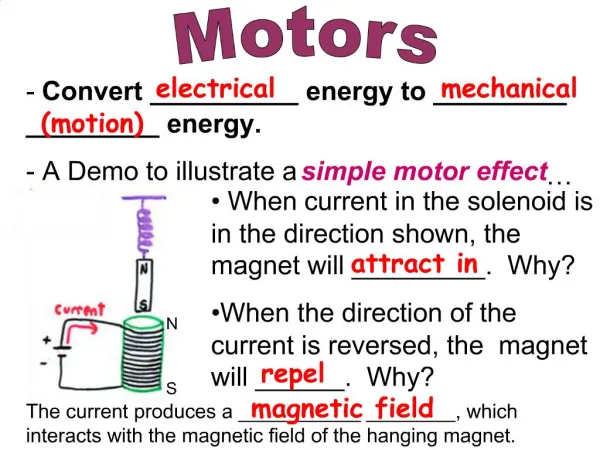
Motors and Control
490 likes | 728 Views
Capstone Design -- Robotics. Motors and Control. Jizhong Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu. N. S. -. -. +. +. v. v. Robot Actuators. Stepper motors DC motors AC motors. Physics review:. Things seek lowest energy states.

Motors and Control
E N D
Presentation Transcript
Capstone Design -- Robotics Motors and Control Jizhong Xiao Department of Electrical Engineering City College of New York jxiao@ccny.cuny.edu
N S - - + + v v Robot Actuators Stepper motors DC motors AC motors Physics review: Things seek lowest energy states. Nature is lazy. • iron core vs. magnet N S • magnetic fields tend to line up Electric fields and magnetic fields are the same thing.
S N N S S N Stepper Motor Basics stator rotor Stator: made out of coils of wire called “winding” Rotor: magnet rotates on bearings inside the stator Current switch in winding ==>Magnetic force ==>hold the rotor in a position Electromagnet • Direct control of rotor position (no sensing needed) • May oscillate around a desired orientation (resonance at low speeds) • Low resolution printers computer drives
Increased Resolution S torque N S angle N Half stepping
Increased Resolution S N S More teeth on rotor or stator N Half stepping
Increased Resolution S N S More teeth on rotor or stator N Half stepping
How to Control? Step Table Step Red Blue Yellow White 0 + - + - 1 - + + - 2 - + - + 3 + - - + 4 + - + - 4 Lead Wire Configuration Clockwise Facing Mounting End Each step, like the second hand of a clock => tick, tick Increase the frequency of the steps => continuous motion
Motoring along... • direct control of position • precise positioning (The amount of rotational movement per step depends on the construction of the motor) • Easy to Control • under-damping leads to oscillation at low speeds • torque is lower at high speeds than the primary alternative…
N S DC motor basics permanent magnets N rotor S stator brush + V - commutator attached to shaft
N S N S DC motor basics permanent magnets N rotor S N S stator + + V V - -
S N S N N S DC motor basics permanent magnets N rotor S N S N S stator + + + V V V - - -
Position Sensors • Optical Encoders • Relative position • Absolute position • Other Sensors • Resolver • Potentiometer
Optical Encoders • Relative position - direction light sensor - resolution decode circuitry light emitter grating
Optical Encoders mask/diffuser • Relative position light sensor decode circuitry light emitter grating A diffuser tends to smooth these signals Ideal Real
Optical Encoders • Relative position - direction light sensor - resolution decode circuitry light emitter grating
Optical Encoders • Relative position - direction light sensor - resolution decode circuitry light emitter grating A A A lags B B B
Optical Encoders • Relative position - direction light sensor - resolution decode circuitry light emitter grating Phase lag between A and B is 90 degree A B A leads B
Optical Encoders • Detecting absolute position something simpler ?
Optical Encoders • Detecting absolute position wires ?
Gray Code # Binary 0 1 2 3 4 5 6 7 8 9 0 1 10 11 100 101 110 111 1000 1001 000 001 011 010 110 111 101 100 among others...
Other Sensors • Resolver • = driving a stepper motor • Potentiometer • = varying resistance
What you want to control = what you can control N S Control Control: getting motors to do what you want them to For DC motors: speed voltage windings’ resistance R w e V back emf V N S e is a voltage generated by the rotor windings cutting the magnetic field emf: electromagnetic force
Controlling speed with voltage e = kew • The back emf depends only on the motor speed. • The motor’s torque depends only on the current, I. t = kt I R e V DC motor model
t R V = + kew kt Controlling speed with voltage e = kew • The back emf depends only on the motor speed. • The motor’s torque depends only on the current, I. t = kt I Istall = V/R V = IR + e • Consider this circuit’s V: current when motor is stalled How is V related to w ? speed = 0 torque = max R e V - or - V R w = - t + ke kt ke DC motor model Speed is proportional to voltage.
speed vs. torque at a fixed voltage speed w V no torque at max speed ke max torque when stalled ktV torque t R
speed vs. torque at a fixed voltage Linear mechanical power Pm = F v speed w Rotational version of Pm = t w V no torque at max speed ke ktV stall torque torque t R
speed vs. torque at a fixed voltage Linear mechanical power Pm = F v speed w Rotational version of Pm = t w V ke max speed power output speed vs. torque ktV stall torque torque t R
speed vs. torque speed w V ke gasoline engine max speed power output speed vs. torque ktV stall torque torque t R
Motor specs Electrical Specifications (@22°C) For motor type 1624 003S 006S 012S 024 -------------------------- -------- -------- -------- --------- ------- nominal supply voltage (Volts) 3 6 12 24 armature resistance (Ohms) 1.6 8.6 24 75 maximum power output (Watts) 1.41 1.05 1.50 1.92 maximum efficiency (%) 76 72 74 74 no-load speed (rpm) 12,000 10,600 13,000 14,400 no-load current (mA) 30 16 10 6 friction torque (oz-in) .010 .011 .013 .013 stall torque (oz-in) .613 .510 .600 .694 velocity constant (rpm/v) 4065 1808 1105 611 back EMF constant (mV/rpm) .246 .553 .905 1.635 torque constant (oz-in/A) .333 .748 1.223 2.212 armature inductance (mH) .085 .200 .750 3.00 kt ke
t R V = + kew kt Back to control Basic input / output relationship: We can control the voltage applied V. We want a particular motor speed w . How to change the voltage? V is usually controlled via PWM -- “pulse width modulation”
PWM • PWM -- “pulse width modulation • Duty cycle: • The ratio of the “On time” and the “Off time” in one cycle • Determines the fractional amount of full power delivered to the motor
wd - wa wa V desired wd compute V from the current error - Motor actual speed wa Open-loop vs. Close-loop Control Open-loop Control: V(t) Controller solving for V(t) desired speed w Motor w actual speed If desired speed wd actual speed wa, So what? Closed-loop Control: using feedback PID controller
d e dt d e dt PID Controller PID control: Proportional / Integral / Derivative control V = Kp (wd - w) + Ki ∫ (wd - w) dt + Kd V = Kp• ( e + Ki ∫ e + Kd ) Error signal e wd - wa actual w V desired wd compute V using PID feedback - Motor actual speed w
Evaluating the response overshoot steady-state error ss error -- difference from the system’s desired value settling time overshoot -- % of final value exceeded at first oscillation rise time -- time to span from 10% to 90% of the final value settling time -- time to reach within 2% of the final value rise time How can we eliminate the steady-state error?
Control Performance, P-type Kp = 20 Kp = 50 Kp = 500 Kp = 200
Steady-state Errors, P-type Kp = 50 Kp = 200
Control Performance, PI - type Kp = 100 Ki = 50 Ki = 200
You’ve been integrated... Kp = 100 instability & oscillation
Control Performance, PID-type Kp = 100 Kd = 5 Kd = 2 Ki = 200 Kd = 10 Kd = 20
PID Tuning How to get the PID parameter values ? (1) If the system has a known mathematical model (i.e., the transfer function), analytical methods can be used (e.g., root-locus method) to meet the transient and steady-state specs. (2) When the system dynamics are not precisely known, we must resort to experimental approaches. Ziegler-Nichols Rules for Tuning PID Controller: Using only Proportional control, turn up the gain until the system oscillates w/o dying down, i.e., is marginally stable. Assume that K and P are the resulting gain and oscillation period, respectively. Then, use for P control for PI control for PID control Kp = 0.5 K Kp = 0.45 K Kp = 0.6 K Ziegler-Nichols Tuning for second or higher order systems Ki = 1.2 / P Ki = 2.0 / P Kd = P / 8.0
Implementing PID Use discrete approximations to the I and D terms: • Proportional term: ei = wdesired - wactual at time i i=now • Integral term: S ei i=0 • Derivative term: ei - 2ei-1 + ei-2 How could this discretization affect the performance of a system? Sampling time is critical!!
What is proper sampling • Proper sampling: • Can reconstruct the analog signal from the samples • Aliasing: • The higher frequency component that appears to be a lower one is called an alias for the lower frequency • Aliasing: the frequency of the sampled data is different from the frequency of the continuous signal Aliasing b. 0.09 of sampling rate might represent, a 90 cycle/second sine wave being sampled at 1000 samples/second; in another word, there are 11.1 samples taken over each complete cycle of the sinusoid d. Aliasing occurs when the frequency of the analog sine wave is greater than the Nyquist frequency (one-half of the sampling rate); in other word, the sampling frequency is not fast enough. Aliasing misrepresents the information, so the original signal cannot be reconstructed properly from the samples.
Shannon’s Sampling Theorem • An analog signal x(t) is completely specified by the samples if x(t) is bandlimited to , where • In other word, a continuous signal can be properly sampled, only if it does not contain frequency components above one-half of the sampling rate. • Definitions: • Given a signal bandlimited to , must sample at greater than to preserve information. The value is called Nyquist rate (of sampling for a given ) • Given sampling rate , the highest frequency in the signal must be less than if samples are to preserve all the information. The value is called the Nyquist frequency (associated with a fixed sample frequency).
Rule of Thumb • For a closed-loop control system, a typical choice for the sampling interval T based on rise time is 1/5 th or 1/10 th of the rise time. (i.e., 5 to 10 samples for rise time)
Motor Drive • Micro-controller • Logic Level • Motor Drive Components • Power transistors • H-Bridge Drivers • etc ...
Useful Links • 6.270 MIT’s Autonomous Robot Design Competition, http://web.mit.edu/6.270/www/home.html • Acroname Inc. for Easy robotics, sensors, kits, etc, http://www.acroname.com/ • Interactive C User’s Guide, etc., http://www.newtonlabs.com/ic/ • Handy board, http://www.handyboard.com/ • Pitsco Lego Dacta, lego components, http://www.pitsco-legodacta.com/intro.htm • The Electronic Goldmine: cheep motors, electronics components, http://www.goldmine-elec.com • Applied Motion Products: Step/DC motors and drives, http://www.applied-motion.com • Jameco Electronics: http://www.jameco.com
Assignment • Refresh you memory • Control Theory • (Text book: K. Ogata, Modern Control Engineering, Prentice Hall) • Electronics (OP-amp, motor drive) • Laboratory • Specs of Motors • Motor Drive Circuit • Looking for Drive Components